



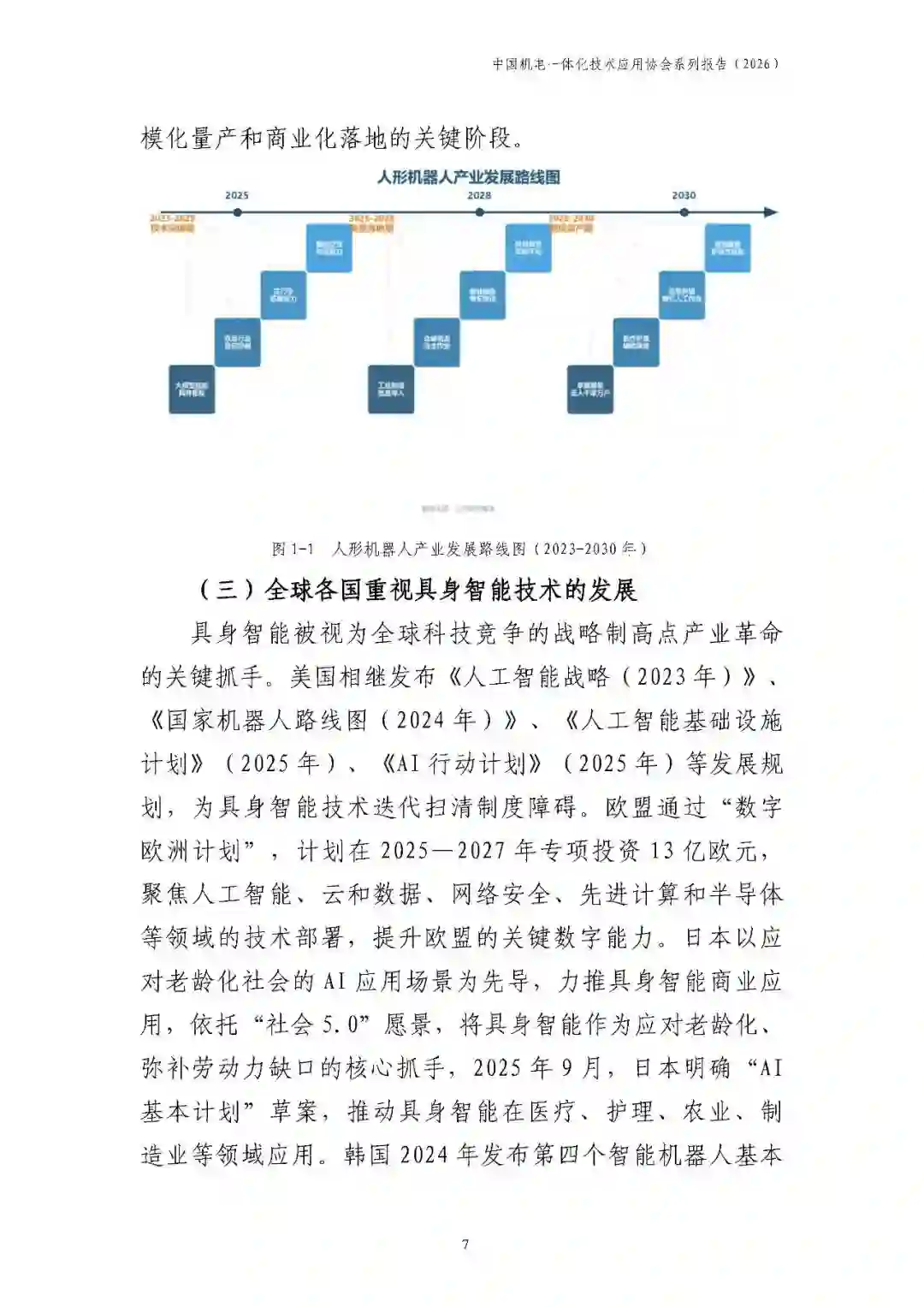
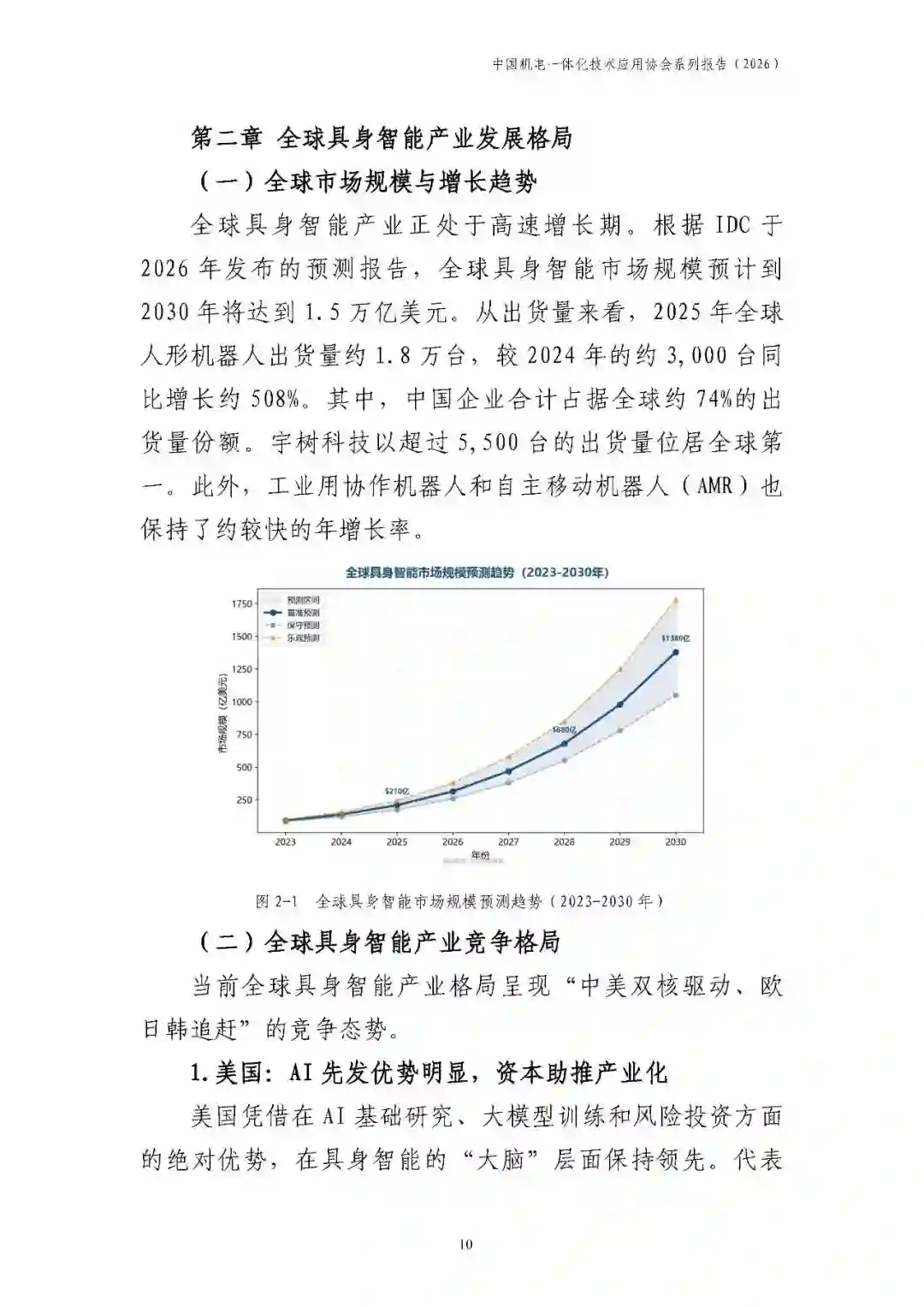
具身智能(Embodied Intelligence)是人工智能与机器人技术深度融合的前沿领域,被视为继大语言模型之后的下一代人工智能范式。它以物理实体为载体,通过感知、认知、决策与执行的完整闭环,实现机器在真实物理世界中的自主交互与操作,是连接数字智能与物理世界的关键桥梁。2025—2026 年,全球具身智能产业进入爆发式增长阶段,中国凭借完整的制造业产业链、庞大的应用场景资源和持续加码的政策支持体系,在全球竞争中占据突出地位。
本报告系统梳理了具身智能产业的概念内涵与演进历程、全球竞争格局、中国产业竞争力、核心技术体系、关键零部件与产业链、多元应用场景、政策标准体系、投融资动态及未来发展趋势。本书基于IFR(国际机器人联合会)、IDC、高盛研究部、中国电子学会、36 氪研究院、睿工业等权威机构的最新数据,结合对宇树科技、智元机器人、优必选、傅利叶智能、银河通用等头部企业的深度研究,力求为政府部门、产业界和投资机构提供全面、客观、前瞻性的决策参考。
本文介绍了一套低成本、自建式地基反无人航空系统(CUAV)的设计、开发与测试环境,旨在资源受限环境下提供有效的空域安全解决方案。本研究选取并确立了动能式反无人航空技术路径,因其作为最后一道防御手段,是当前最具可行性、成本最低且可复用的缓和方案。系统利用易得材料(包括线上零售商与五金店采购件),结合自制气动系统与可复用3D打印弹丸及模块化互换设计。本研究探索了经济型无人机防御的可行性,并引入短距精度度量指标以评估系统弹道特性。通过在普渡大学4号机库内的严格室内测试,研究从弹丸高度、射程与精度维度,评估了系统在不同环境条件下的性能表现。测试覆盖了气动发射器90°视场角,并通过小误差对照表凸显潜在技术改进方向。研究发现,TPU(热塑性聚氨酯) 为本研究最佳材料,配套参数为:弹丸(4.16a)填充率10%、打印温度225°C(437°F)、打印速度70 mm/s。图4.10、4.11、4.12、4.13中的结果将通过提供影响系统性能的材料与设计选择的实证依据,显著推进低成本无人机防御技术研究。研究结果表明,系统性能受环境温度影响,进而影响其于不同场景下的稳定性。这为利用同类技术强化针对非法无人机的安防措施提供了实践启示。本研究通过证明有效解决方案既可负担又可及,填补了当前动能拦捕式无人机防御技术的显著空白。本工作不仅助推反无人机技术进步,亦鼓励该领域持续的设计创新,为可扩展、可适配的无人机防御系统进一步研发铺路。
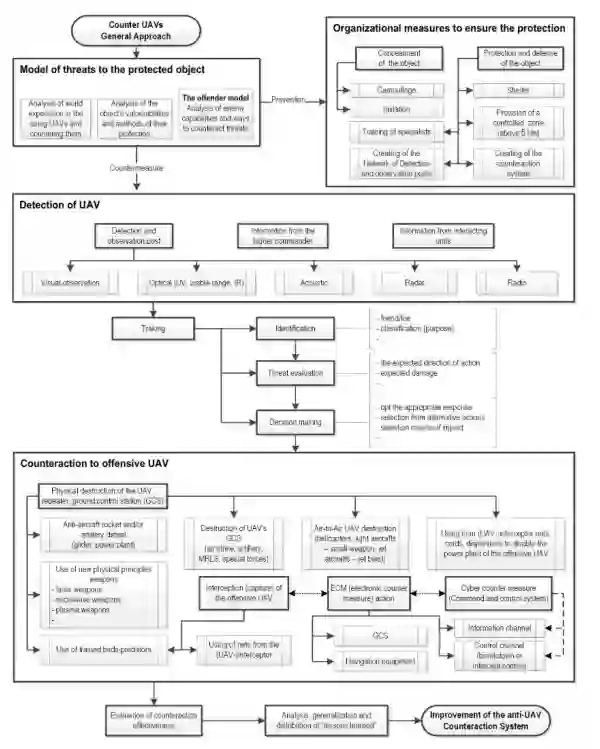
图 无人机的一般方法
探测、分类、识别、跟踪并消除低空、慢速、小型(LSS)空中威胁,对现有传感器与效应器系统构成了重大挑战。所谓的第一代反无人航空系统(C-UAS)往往依赖侦测控制器与无人机间的数据链,这在应对当前威胁时能力有限。然而,当操作者篡改标准数据链时,这种探测手段便面临挑战,且对当前及未来的自主无人机完全无效。其他现有的无人机探测与中和手段,例如雷达与光学传感器融合,不仅可靠性不足、易产生大量虚警,且通常操作人力密集。北约SCI-301研究任务组(RTG)一直致力于明确第二代反无人航空系统应具备的核心能力。本文将概述该任务组过去三年的研究成果。

图1:猎鹰盾系统的探测和中和组件。
2026年7月9日,美军联合跨机构特遣队(JIATF)401发布了新版手册,旨在协助政府、产业界与学术界受众围绕防范非法无人航空系统(UAS,俗称“无人机”)的基本原则形成共识。该指南题为《小型无人机,大问题:反无人机首要原理路径》,隶属于该特遣队统筹五角大楼与联邦跨机构伙伴间反无人航空系统(C-UAS)行动的任务范畴。

战场经验借鉴
除确立无人机威胁通用术语等基础内容外,手册提供了无人机作战的最新信息与战术,涵盖乌克兰战场与中东行动的经验教训。例如,手册指出伊朗制无人机(尤以“沙赫德-136”为甚)在“史诗怒火”行动初期阶段占伊朗反击作战的66%。此外,手册详述了在乌克兰被广泛应用的第一人称视角(FPV)无人机。尽管据估算仅有20%至40%的乌克兰无人机命中目标,但其造成的俄方系统损毁占比达60%至70%,俄方伤亡占比达70%至80%。上述数据凸显了反无人机能力在当代战场上的重要性。
分层防御路径
防务专家普遍认同,无人机防御不存在“银弹”式单一解法。在审视促成反无人机行动成功的要素时,手册强调“分层路径”——即多种重叠安防机制的复合运用——是对抗非法无人机最有效的防御方式。该路径倡导组合运用多项能力,包括针对无人机运行机制实施打击、干扰无人机导航,以及采用硬杀伤手段予以摧毁。最终,毁伤机制的选择在很大程度上取决于威胁本身属性。
侦测为先
手册强调,早期侦测无人机可彻底改变威胁处置的结局,因此侦测是任何反无人机解决方案的核心环节。现有多数雷达系统设计用于捕捉大型航空器或高速导弹,低慢小无人机由此构成关键挑战。手册指出,无人机侦测依赖若干互补传感手段,即便是最尖端单一侦测方法亦不足以独立胜任。
人工智能与训练
手册同时着重强调对人员开展反无人机实操训练的必要性,以及以人工智能赋能人员的路径。手册要求训练团队掌握识别无人机活动与快速响应的能力。当然,人员现由人工智能提供支撑——人工智能可对海量传感器数据流进行排序、比对、关联与异常标记,此类负荷若交由人员独自处理将不堪重负。手册明确,人工智能应被视为降低防御方认知过载的工具。
“无人机不会消失;它们已在此驻留,所有人——无论国内还是海外——都必须受过训练、随时准备应对。”——JIATF-401《反无人机手册》
为何重要?
手册未必提供突破性新知,但其在将无人机威胁相关通用术语与最佳实践“法典化”方面存在必要性。手册发布前,各独立组织受制于术语碎片化与战术各异的局面。通过确立“首要原理”路径,手册提供了统一概念框架,为联合行动、跨机构协同及军民伙伴关系铺设基础。
此外,手册折射出当今防务格局对无人机及反无人机行动持续加大的侧重。值得注意的是,该手册是JIATF-401在2026年为支撑反无人机行动推出的若干资源之一:2月该特遣队上线“反无人机市场”平台以协助政府用户甄选经认证无人机防御技术;3月发布关于无人机侦测技术、隐私保护及反无人机系统标准化测试的指导意见。
为应对迫在眉睫的多无人机城市袭击,防御方已在城区部署无人机群。此类无人机须实施拦截与毁伤压制,以最大限度降低攻击造成的潜在破坏。本研究将该场景建模为序贯斯塔克伯格安全博弈:防御方首先承诺采用混合序贯防御策略,攻击方继而采取最优反制策略。我们提出了名为S2D2的高效算法,可生成防御策略方案。基于80座真实城市的实验数据表明,相较于既有文献中的贪婪启发式算法,S2D2显著提升了防御效能。我们证明:在城市结构的若干合理假设下,S2D2输出的解具有良好结构特性,可近似收敛至强斯塔克伯格均衡(SSE)。
第二节从宏观视角总览S2D2整体架构与决策机制,阐明全文各模块间的逻辑关联。第三节将核心问题建模为序贯安全博弈(SSG)。第七节将进一步深入探讨模型设计的理论依据,并与替代方案进行对比分析。第四节详述S2D2算法的三阶段流程:首先通过“粗化”算法(参见第4.1节)将城市拓扑图划分为若干簇群(“街区”——即顶点簇);随后在单架无人机博弈框架下(假设攻防双方各配置一架无人机且于单一街区内对抗),求解近似最优解(参见第4.2节)——该算法将文献[16]的方法拓展至序贯博弈场景,有效克服了攻击方策略空间爆炸难题;进而基于单无人机博弈的解,推导多无人机博弈的近似解(参见第4.3节),此过程通过推广文献[20]关于多资源攻击者安全博弈的研究,实现了对非线性效用函数的支持。S2D2藉此完成防御无人机在各街区的兵力分配决策。第五节证明:在满足粗化图特定条件时,S2D2必能输出近似SSE解。第六节展示实验结果,第八节总结全文。
综述 | Self-Improvements in Modern Agentic Systems 现代智能体自我改进
导读
自我改进智能体正在从概念讨论走向工程系统。今天的 Agent 不再只是一个调用大模型的脚本,而是由基础模型、提示词、记忆、工具和控制逻辑共同组成的运行系统。真正关键的问题也随之改变:系统能否从自身执行经验中提取信号,并把这些信号转化为持续能力增益?
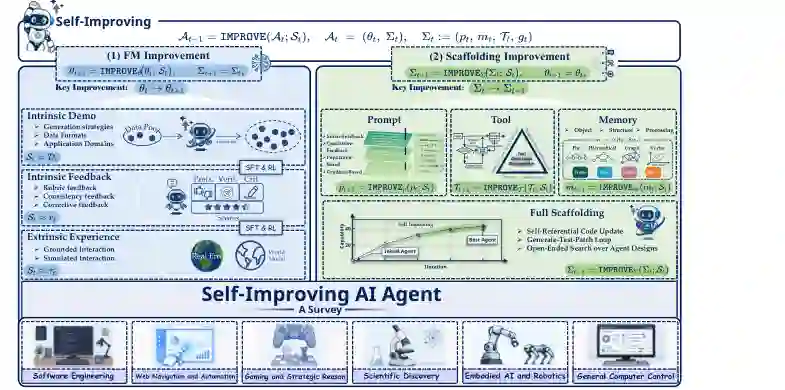
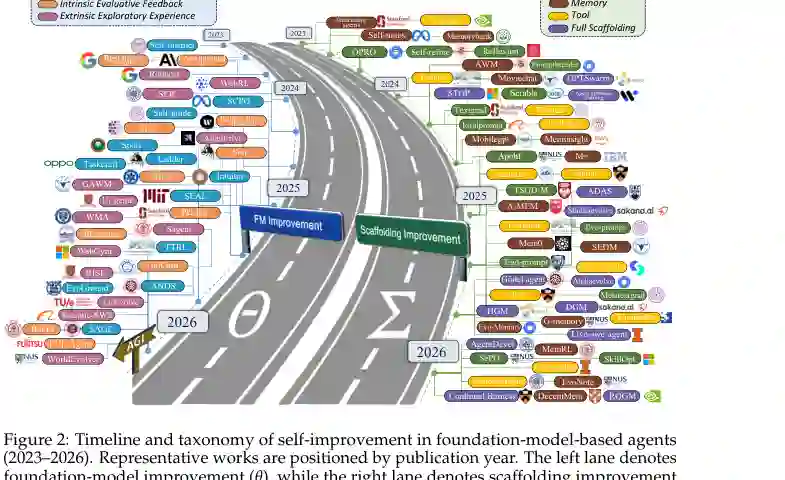
这篇长达 97 页的综述《Self-Improvements in Modern Agentic Systems: A Survey》给出了一个清晰的系统框架。作者将现代自我改进智能体看作“基础模型 + 操作脚手架”的组合,并把改进路径分成两大类:一类是基础模型改进,即更新模型参数;另一类是脚手架改进,即在不改模型权重的情况下更新 prompt、memory、tool 或完整控制逻辑。前者慢但稳定,适合把能力固化进模型;后者快且可回滚,适合任务级、系统级快速迭代。
本文严格按原文组织结构展开,覆盖历史背景、形式化定义、方法分类、基础模型改进、脚手架改进、应用、评测、讨论和未来方向,并压缩到公众号可读长度。
1 Introduction 引言
自我改进是人工智能长期以来的核心命题。从 Good 对“智能爆炸”的讨论,到 Schmidhuber 的自指学习框架和 Godel Machine,早期研究已经设想过能检查、修改并提升自身的系统。但在过去,这类系统必须在底层代码、规则或权重空间中搜索,工程上很难扩展。
现代基础模型改变了这一格局。LLM 和 VLM 提供了统一的自然语言接口,使推理、执行、反馈和修改都可以通过语义化对象表达。与此同时,现代 Agent 通常被包裹在操作脚手架中,包括提示词、记忆、工具接口和控制逻辑。于是,自我改进不再只是“模型自己改权重”,也可以是“系统自己改运行方式”。
论文的核心贡献包括三点。第一,追溯自我改进系统从经典 AI 到基础模型智能体的历史演化。第二,提出统一形式化,把 Agent 表示为基础模型和脚手架的组合。第三,建立系统分类,将方法按更新目标和学习信号组织起来,并讨论应用、评测和未来问题。
2 Historical Context and Theoretical Foundations 历史背景与理论基础
论文指出,自我改进不是现代大模型时代突然出现的新概念。早期优化和控制理论已经包含“从误差中调整自身”的思想;符号主义时期出现了启发式搜索和程序自修改;连接主义时期则发展出元学习、快速权重和学习算法发现;再往后,Godel Machine 等工作将“可证明有益的自我重写”推向理论极限。 这些早期路线的共同瓶颈是搜索空间过大。无论是直接改代码还是改权重,系统都很难在开放任务中找到可靠的改进路径。基础模型时代的变化在于,自然语言成为一种高层可操作媒介:Agent 可以用语言描述失败、生成修复、总结经验、改写 prompt、组织工具,甚至产生候选代码补丁。这让自我改进从纯理论命题变成可工程化的迭代循环。
3 Definitions 定义
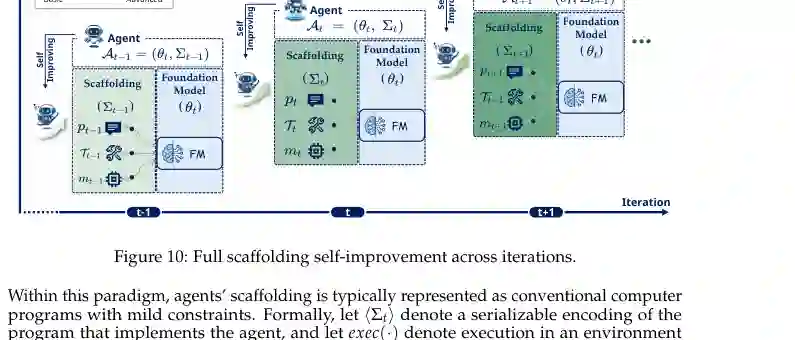
论文把现代 Agent 表示为由基础模型和脚手架组成的系统。基础模型提供通用认知能力,脚手架则负责构造上下文、接入记忆、选择工具、执行控制逻辑并与环境交互。
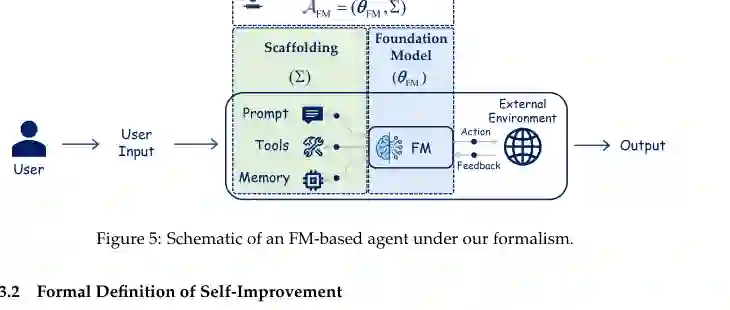
在这个框架下,自我改进被定义为一种自诱导更新:Agent 通过自身执行产生学习信号,例如轨迹、失败、批评、验证结果或候选修改,然后将这些信号提交到更新算子中,持久修改模型参数或脚手架组件。关键在于,这种更新不是临时上下文变化,而是会影响后续执行的持久配置变化。 论文也区分了相关概念。普通在线学习、强化学习、元学习、自我反思都与自我改进相关,但自我改进强调系统对自身配置的可持续修改,包括模型权重和操作结构。
4 A Taxonomy of Existing Approaches 方法分类
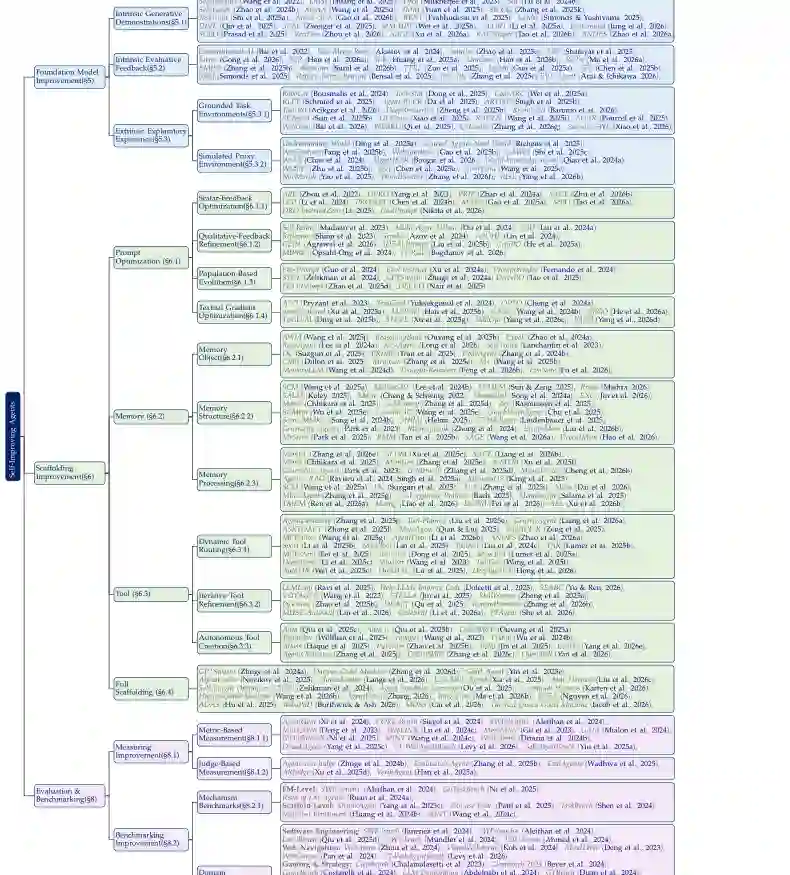
论文最重要的分类轴是“更新什么”。如果更新基础模型参数,就是 foundation model improvement;如果保持模型参数不变、更新 prompt、memory、tool 或控制逻辑,就是 scaffolding improvement。另一个分类轴是“信号从哪里来”:信号可能来自模型自己生成的示范、模型自己产生的评价反馈,也可能来自真实或模拟环境中的交互经验。
基础模型改进更像慢循环。它把经验固化到权重中,收益可以跨任务复用,但训练成本高,也可能带来灾难性遗忘或能力退化。脚手架改进更像快循环。它改的是系统外围结构,通常更便宜、更容易回滚,也更适合针对任务和环境快速适配。
5 Foundation Model Improvement 基础模型改进
基础模型改进直接更新模型参数。论文将其按学习信号分为三类:内生生成示范、内生评价反馈和外生探索经验。
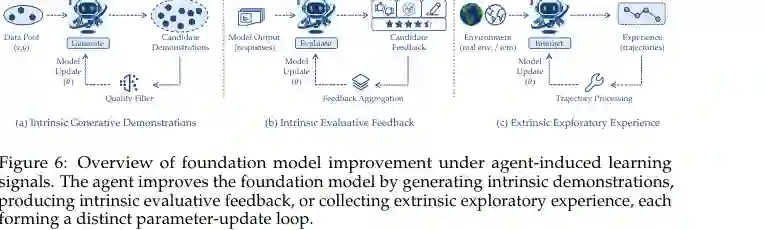
内生生成示范指 Agent 自己生成训练样本,例如指令-回答对、推理轨迹、执行日志、代码和测试样例。它的优势是减少人工标注依赖,但风险是模型把自己的错误、偏见和低多样性样本反复训练进去,导致模型坍缩或知识泡沫。 内生评价反馈指 Agent 或内部评估器对候选输出打分、排序、偏好比较或提出 critique。它让模型能把“自我判断”转为训练信号,但也容易强化自身盲点。如果生成器和评估器过于同源,系统可能学会迎合评估表面形式,而非真正提升能力。 外生探索经验来自真实或模拟环境。例如代码 Agent 通过单元测试获得反馈,Web Agent 通过页面状态和任务结果获得轨迹,机器人通过物理或仿真环境获得经验。这类信号更 grounded,但交互成本高、奖励稀疏,且世界模型可能产生看似合理但错误的模拟轨迹。 这一部分的启示是:参数级自我改进需要可靠信号、质量过滤、外部锚点和回滚机制。没有验证的自训练循环可能越改越偏。
6 Scaffolding Improvement 脚手架改进
脚手架改进保持基础模型参数不变,改的是 Agent 周围的操作结构。论文将其分为 prompt、memory、tool 和 full scaffolding 四类。
提示词
Prompt 是 Agent 接收任务、组织上下文和表达约束的语义接口。Prompt 自我改进可以使用黑盒优化、迭代反馈、群体进化和 textual gradient 等方式。它便宜、直观、易回滚,是当前最常见的快循环方法之一。
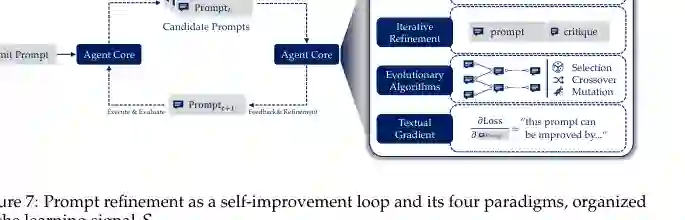
不过,prompt 优化也容易过拟合 benchmark 或评测器。一个 prompt 在特定任务上变强,不代表它获得了通用能力;它也可能只是学会了利用评分漏洞。
记忆
Memory 让 Agent 从一次性对话走向长期适应。论文将记忆拆成对象、结构和处理三个维度。记忆对象可以是交互轨迹、筛选后的原始内容、外部知识或向量嵌入;记忆结构可以是扁平、层级、图结构或向量库;记忆处理则包括创建、读取、更新、删除、压缩和信用分配。
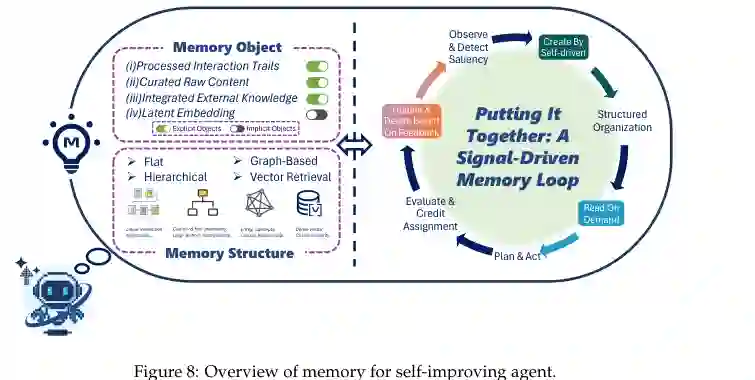
记忆的关键不是“存得越多越好”。过度存储会引入噪声、隐私泄漏和检索压力;过度删减又会丢失关键经验。真正的自我改进记忆应当是信号驱动的:根据任务结果和反馈决定哪些经验值得保留、重写或遗忘。
工具
Tool 改进关注 Agent 如何选择、修复、组合或创造工具。随着工具池扩大,Agent 不仅要会调用工具,还要学会工具治理:什么时候路由到哪个工具、失败后如何修复工具、什么时候创建新工具。 论文把工具改进概括为三类:动态工具路由、迭代工具修复和自主工具创建。它们共同把 Agent 从静态工具使用者推向可扩展的行动系统。
完整脚手架
Full scaffolding 是最深层的结构改进。此时 Agent 不只改一个 prompt 或一条记忆,而是把整个操作逻辑甚至自身代码库视为可修改对象。软件工程中的自改代码、生成-测试-补丁循环、开放式 Agent 设计搜索都属于这一范畴。
完整脚手架改进潜力大,但风险也高。必须有单元测试、回归测试、安全检查和版本回滚,否则 Agent 可能把自己的运行结构改坏。
7 Applications 应用
论文梳理了六类典型应用:软件工程、网页导航与自动化、游戏和战略推理、科学发现、具身 AI 与机器人、通用计算机控制。
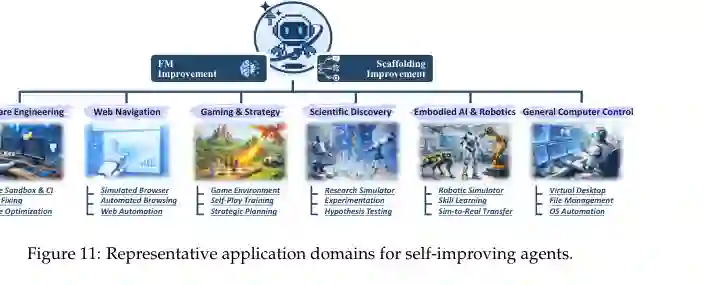
软件工程是最自然的试验场,因为编译器、测试、lint 和 CI 能提供可执行反馈。Web 导航和自动化提供真实交互轨迹,但页面变化和 UI 反馈噪声很大。游戏与战略推理适合自博弈和长期规划。科学发现依赖实验模拟器、假设生成和可复现实验。具身 AI 与机器人更强调物理约束和安全。通用计算机控制则面对开放界面、文件系统和操作系统自动化。 这些应用的共同点是:环境本身为自我改进提供反馈,但反馈的可靠性、成本和安全边界各不相同。
8 Evaluation 评测
自我改进系统不能只看最终分数。论文强调,评测应关注“是否真的改进、改进来自哪里、是否可泛化、是否安全”。常见方式包括 metric-based measurement 和 judge-based measurement。前者依赖可执行指标,如测试通过率、成功率、成本和延迟;后者依赖人类或模型评判,如偏好、质量、解释性和安全性。 更难的是 benchmark 设计。机制 benchmark 用来测试某类改进机制本身,例如 prompt 优化或记忆更新;领域 benchmark 则测试完整 Agent 在软件工程、Web、机器人等任务中的持续表现。论文提醒,静态 benchmark 很容易被过拟合或被 Agent 找到漏洞。因此,自我改进评测应报告完整学习曲线、回滚策略、消融分析、分布外泛化和安全失败模式。
9 Discussion 讨论
论文把未来方向分成两大主题。第一是终身适应算法,包括测试时持续适应、主动探索与好奇心、参数蒸馏和模型-脚手架联合优化。一个关键问题是 credit assignment:当 Agent 失败时,到底应该改 prompt、改工具包装器、更新记忆,还是做梯度训练? 第二是复杂性、约束和开放世界鲁棒性。自我改进不能无限消耗 token、算力和交互预算;也不能只在静态仓库或固定仿真器中验证。未来系统需要资源受限的改进动态、多 Agent 协同进化,以及能抵抗 API 变化、界面重设计和对抗输入的开放世界适应能力。 这部分最重要的结论是:自我改进不只是“更强模型”的问题,而是反馈、架构、安全边界和评测协议共同作用的问题。
10 Conclusion 总结
这篇综述提供了一个很好的共同语言:现代自我改进智能体可以被看作基础模型和脚手架的耦合系统,能力提升可以通过两条路径发生。慢路径是基础模型改进,把示范、评价或环境经验固化到参数中;快路径是脚手架改进,更新 prompt、memory、tool 和控制逻辑。 真正可靠的自我改进系统需要满足几个条件:更新信号可验证,改进过程可归因,失败能够回滚,评测不被静态 benchmark 绑架,安全边界持续可审计。未来的 Agent 不应每次交互后重置,而应能在受控范围内积累经验、修正结构、扩展能力。也正因为如此,自我改进会成为 Agent 系统从“会执行任务”走向“会长期成长”的关键分水岭。
陆军轻型步兵编队在应对先进小型无人机系统(sUAS)方面装备不足。本项目采用系统化流程,对原计划纳入“全兵种机动概念聚焦作战实验”(CFWE-M)的五类潜在反小型无人机系统(C-sUAS)进行分析,评估其效能并就如何在班级单位实现最优运用提出建议。研究依托“步兵战士仿真系统”(IWARS)建模,重点评估所选C-sUAS技术对班级分队生存率与杀伤力的影响。结果表明,降低可探测性并强化特征管理能显著提升部队对抗敌方无人机的生存能力。建议部署“探测-跟踪-识别”(DTI)系统以识别责任区内潜在无人机威胁,并配发多光谱伪装织物披风以规避sUAS探测。若部队不愿为规避探测而牺牲机动性,则建议为其编配伴随作战的自主式反小型无人机无人地面车辆。
伯克利博士论文:用多智能体系统进行任务分解
论文标题: Task Decomposition with Multi-Agent Systems 作者: Long Lian 单位: University of California, Berkeley, EECS 导师: Trevor Darrell 技术报告: UCB/EECS-2026-123 时间: 2026 年 5 月 13 日 论文链接: https://www2.eecs.berkeley.edu/Pubs/TechRpts/2026/EECS-2026-123.pdf
导读
这篇博士论文讨论的是一个正在变得越来越重要的系统问题:当基础模型越来越强,复杂任务是否仍然需要“分解”?作者 Long Lian 给出的答案是肯定的。单个模型可以写代码、生成图像、理解视频、回答问题、做数学推理,但许多真实任务并不是简单的输入到输出映射,而是需要把目标拆成多个子问题,再让不同模块、工具、模型调用或推理线程协同完成。 论文的核心观点是:复杂任务更适合被表示为一组可交互的子问题。语言模型可以充当规划器、解析器、控制器和推理智能体;视觉模型可以负责生成、检测、描述和局部理解;并行推理线程可以分别探索不同解题路径,再把结果合并回来。这样的系统不一定是传统意义上的“多个机器人”,而是更广义的多智能体系统:多个角色、模块、调用或线程共同完成一个任务。 全文分成两条主线。第一条是语言引导的视觉生成:用 LLM 把复杂图像/视频提示分解成空间布局、动态场景布局、检测与修正操作,以及局部描述任务。第二条是自适应并行推理:让语言模型在推理时学会 fork/join,像多线程程序一样把可并行子问题分出去计算,从而改善准确率、延迟和上下文利用。 这篇论文的价值不只在于提出若干具体方法,更在于把“可控生成、局部视觉理解、并行推理”放进同一个设计原则中:AI 系统要可靠解决复杂任务,不能只依赖更大的端到端模型,还需要显式中间表示、可检查的子目标、可修正的流程,以及能够自适应分配计算的执行结构。
一、论文总览:从单体模型到协同系统
现代基础模型的能力增长很快,但论文指出,很多失败并不是因为模型完全没有知识,而是因为任务结构没有被正确表达。复杂图像提示可能包含计数、否定、属性绑定和空间关系;视频生成需要同时处理物体、时间、运动和视角;局部描述需要聚焦指定区域,同时保留全局上下文;数学推理和搜索问题则常常包含可以并行探索的分支。 如果把这些任务都压成一条单独的生成轨迹,模型很容易在某个中间环节失真。图像生成可能漏掉对象或搞错位置;视频生成可能无法保持动态一致;视觉描述可能只给出模糊全局说明;语言推理则可能耗尽上下文窗口,或把本可并行的搜索强行串行化。 作者提出的替代思路是“任务分解”。在视觉生成中,文本提示先被转化为布局、区域、边界框、动态轨迹或修正操作,再交给扩散模型执行;在语言推理中,模型不只线性生成 chain-of-thought,而是可以生成 spawn 和 join 操作,把子问题分给并行线程。 这种思路带来三个好处。第一,可控性更强,因为系统有显式中间表示,可以检查和修改。第二,可扩展性更好,因为不同子任务可以交给不同模块或线程。第三,鲁棒性更高,因为生成失败后可以检测、诊断、修正,而不是一次生成失败就结束。
二、六项核心贡献
论文围绕“任务分解与多智能体系统”给出六项研究贡献。 第一,LLM-grounded Diffusion(LMD):将文本到图像生成分成两个阶段,先由 LLM 把复杂提示解析为带有物体、边界框、背景和负面提示的布局,再由布局引导扩散模型生成图像。 第二,LLM-grounded Video Diffusion(LVD):把同样思想扩展到视频生成,让 LLM 生成动态场景布局,显式描述物体在时间维度上的边界框轨迹,再指导文本到视频扩散模型。 第三,Self-correcting LLM-controlled Diffusion(SLD):把生成过程改造成“生成-检测-诊断-修复”的闭环,用外部感知模型和 LLM 控制器检查生成图与提示是否匹配,并提出潜空间修正操作。 第四,Describe Anything Model(DAM):研究详细局部图像/视频描述,让模型针对用户指定区域生成细粒度、上下文相关的描述,并构建相应数据管线和评测基准。 第五,Adaptive Parallel Reasoning(APR):让语言模型学习显式 spawn/join 操作,把推理树拆成可并行探索的子线程,改善固定上下文和延迟约束下的推理效率。 第六,ThreadWeaver:进一步把自适应并行推理扩展到强推理模型,使模型在标准 LLM 推理引擎上动态生成并发线程,在保持准确率的同时缩短关键路径 token 延迟。
三、语言引导的视觉生成
论文第一部分关注视觉任务。其共同思想是:视觉生成不应该只依赖自然语言提示直接驱动扩散模型,而应该引入显式结构,让语言模型先把用户意图整理成可执行、可检查的中间形式。
复杂提示为什么难
图像扩散模型在普通提示上表现很好,但遇到否定、计数、属性绑定和空间关系时仍容易出错。例如,“桌上没有香蕉”可能仍生成香蕉;“草地上有三只猫”可能数量不对;“红衣男子站在蓝衣女子旁边”可能把颜色或人物关系绑定错;“三个苹果排成 L 形”也可能不满足空间约束。
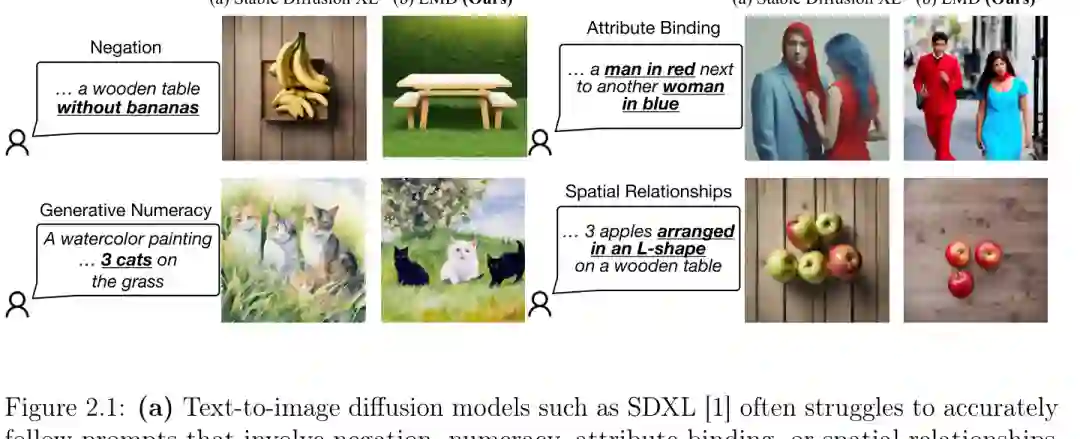
这类错误说明,大模型并不只是需要更漂亮的生成质量,还需要更明确的结构控制。用户真正关心的是对象、属性、位置和关系是否满足要求,而这些信息如果只隐含在文本 embedding 中,就很难被稳定执行。
LMD:把提示转成布局
LMD 的做法是把文本到图像生成拆成两步。第一步,LLM 读取用户提示,输出结构化图像布局,包括每个前景物体的 captioned bounding box、背景描述,以及可选负面提示。第二步,布局引导的扩散控制器使用这些边界框和描述,约束图像生成过程。
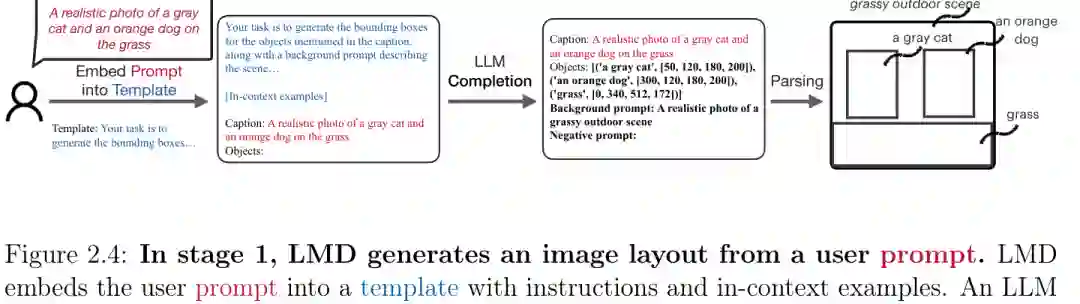
这个设计的关键在于训练自由:方法可以使用现成 LLM 和扩散模型,不需要重新训练底层生成模型。LLM 在这里不是直接生成图像,而是承担规划器角色;扩散模型不是自由发挥,而是在布局约束下完成视觉合成。 这种分解让系统更可解释。如果生成失败,研究者可以检查是 LLM 生成的布局错了,还是布局到图像的执行阶段错了。相比端到端黑箱生成,这种中间表示为调试、交互式修改和多轮编辑提供了接口。
LVD:把图像布局扩展到视频动态布局
视频比图像更难,因为它不只涉及空间位置,还涉及时间连续性、物体运动、相互作用和视角变化。LVD 将文本到视频生成分成两阶段:LLM 先生成动态场景布局(Dynamic Scene Layouts,DSL),描述对象在不同帧中的边界框;随后 DSL-grounded video generator 在扩散生成过程中施加约束。
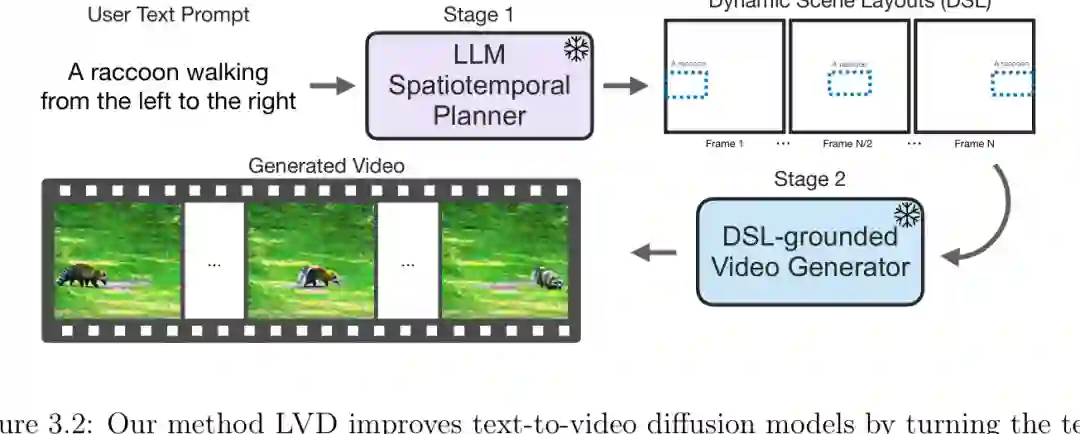
论文强调,LLM 即使不是视频生成器,也能提供有用的时空结构。例如,面对物体移动、弹性、重力、透视等提示,LLM 可以根据少量示例输出合理轨迹。底层视频扩散模型则在 DSL 的约束下生成更符合文本的运动结果。 这说明语言模型的角色可以从“聊天接口”扩展为“任务规划器”。它不负责所有计算,而是把复杂目标翻译成下游模型可以执行的结构。
SLD:从一次生成到自校正闭环
LMD 和 LVD 关注的是生成前的结构规划,而 SLD 进一步引入生成后的自校正。系统先生成图像,再用开放词汇检测器和 LLM 解析器检查提示中的关键对象是否出现、数量是否正确、位置是否匹配。若发现错误,LLM 控制器输出新的边界框或修正意图,并转化为潜空间操作。
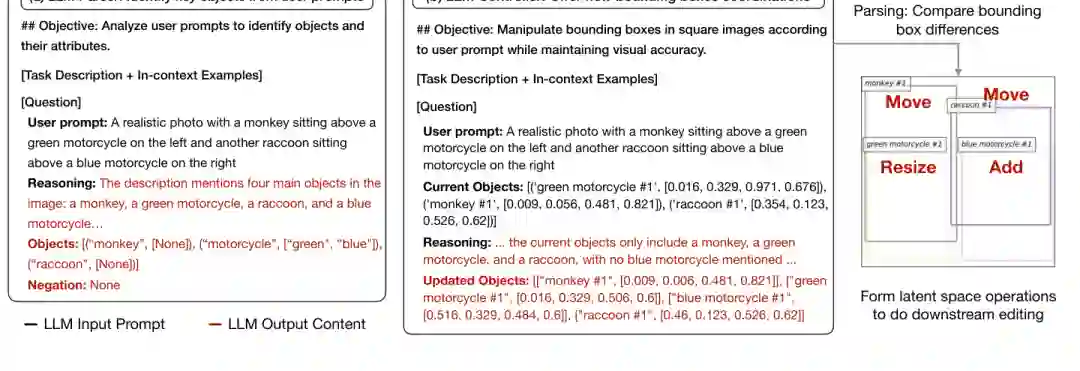
这里的任务分解更像一个闭环智能体系统:解析器负责理解指令,检测器负责观察世界,控制器负责提出修正,扩散模型负责执行修改。这样的流程可以处理对象增加、删除、移动、缩放、属性修改等编辑任务。 更重要的是,SLD 把“生成失败”变成一个可以被诊断和修复的问题。对于需要高可靠性的视觉工作流,单次采样不够,系统必须能够检查输出是否满足约束,并在失败时进行可控修正。
DAM:详细局部描述作为视觉分解接口
论文第五章转向视觉理解:Describe Anything Model 关注如何对用户指定的图像或视频区域生成详细局部描述。普通图像 caption 往往描述整张图,容易忽略局部对象的细节;而许多应用需要知道某个区域中的对象、属性、状态、动作和上下文。
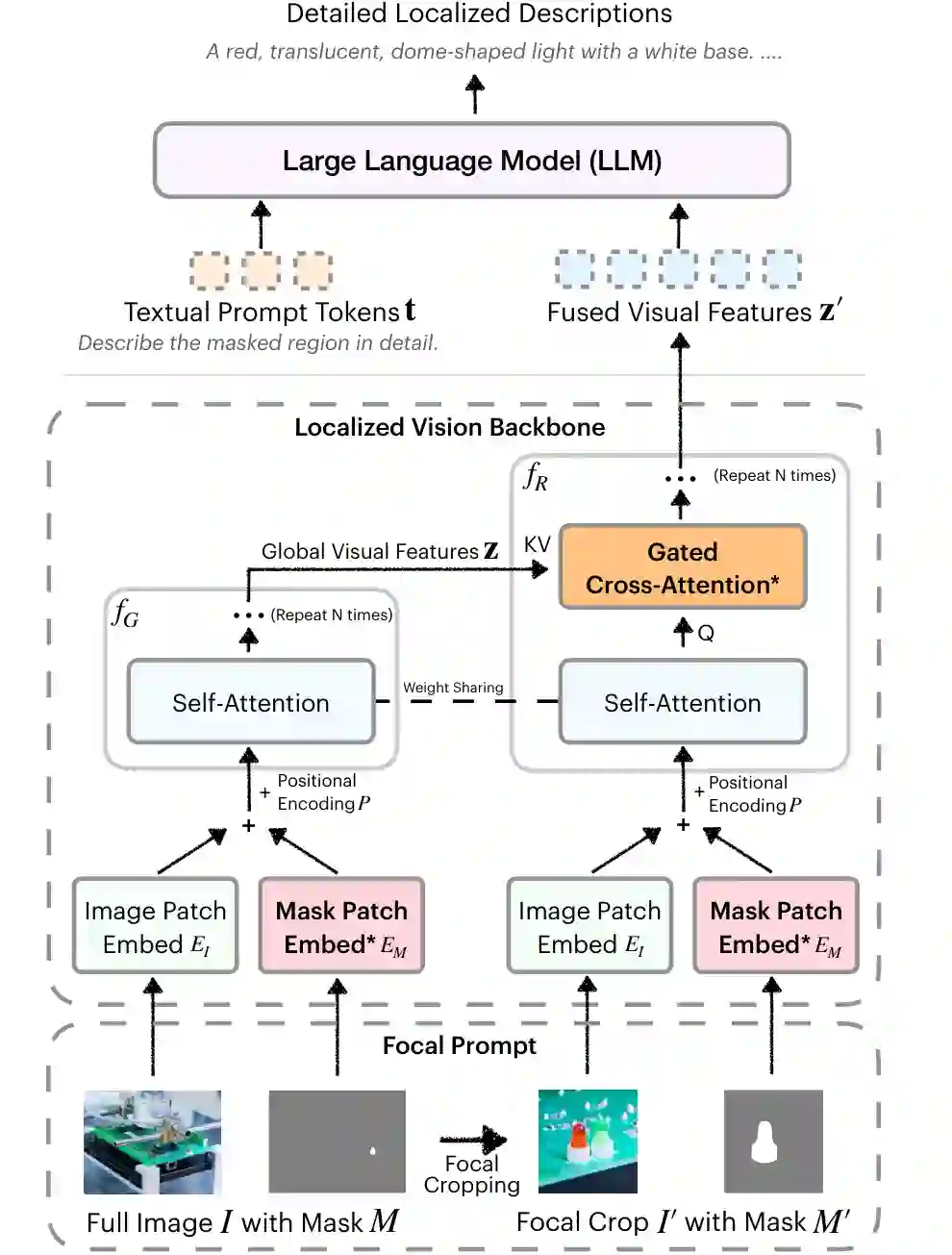
DAM 使用 focal prompt 表示用户指定区域:既保留整图上下文,又对目标局部区域分配更高 token 密度。模型通过局部视觉骨干、全局特征和门控交叉注意力,把局部细节与全局上下文结合,再交给语言模型生成描述。 这项工作与前面的生成方法形成互补。LMD、LVD、SLD 需要结构化视觉监督来控制生成;DAM 则可以产生区域级详细描述,用于数据生成、可访问性、局部理解和可控合成评估。作者还提出 DLC-Bench,用于评估详细局部描述,避免传统 reference caption 不完整导致的误判。
四、为什么显式视觉结构仍然重要
论文第六章反思了一个问题:既然现代图像和视频生成器越来越强,LMD、LVD、SLD 这样的显式结构方法是否还必要? 作者的回答是:如果目标只是生成一张“看起来不错”的图,直接提示可能已经足够;但如果目标是生成“正确”的图像、可控视频、可编辑场景、可检查数据或区域级描述,显式结构仍然重要。越是涉及计数、空间关系、时间约束和局部语义,越需要把用户意图转成可验证的中间表示。 这也是整篇论文前半部分的统一结论:视觉智能不只是更强的生成器,还需要语言、视觉和控制之间的显式接口。中间结构让系统可以规划、执行、检查和修正,而不是把所有责任都交给一次端到端采样。
五、自适应并行推理
论文第二部分把“任务分解”从视觉生成迁移到语言模型推理。核心问题是:语言模型推理为什么必须是一条串行文本轨迹?很多难题天然包含多个可探索分支,如果把它们强行压进一条 chain-of-thought,就会增加延迟、消耗上下文,并限制搜索空间。
APR:让模型学会分叉与合并
Adaptive Parallel Reasoning(APR)引入显式 spawn 和 join 操作。模型可以在推理过程中启动子线程,让不同线程并行探索不同子问题;子线程结束后,把摘要返回主线程,主线程再继续推理。
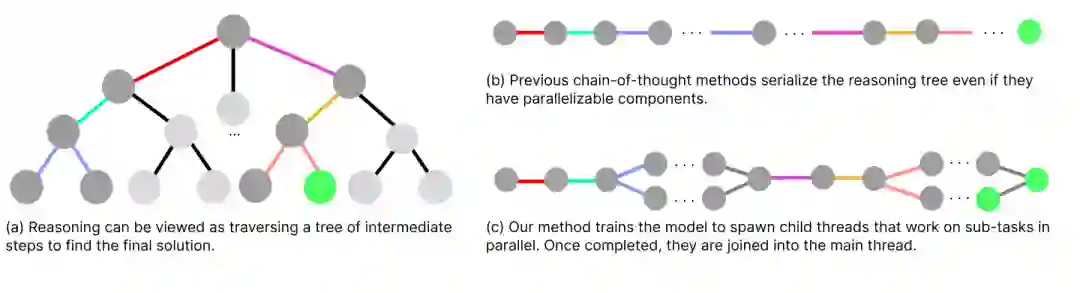
这类似把推理过程从“一条长链”改成“一棵可并行遍历的树”。在 Countdown 等任务中,模型可以把不同运算路径分给不同线程,避免一个线程耗尽上下文窗口。实验显示,APR 在增加测试时计算预算时,比简单 Best-of-N 或串行搜索更有效地利用计算。 这里的关键不是盲目并行,而是自适应并行。模型需要学会什么时候值得分叉,分叉几个线程,每个线程解决什么,最后如何合并结果。这本质上是一种计算资源分配问题。
ThreadWeaver:把并行推理带到强推理模型
ThreadWeaver 进一步研究如何让强推理 LLM 在标准推理引擎上进行自适应多线程推理。相比普通顺序推理,ThreadWeaver 让模型动态生成并发线程,多个线程处理不同子任务,再合并为最终答案。
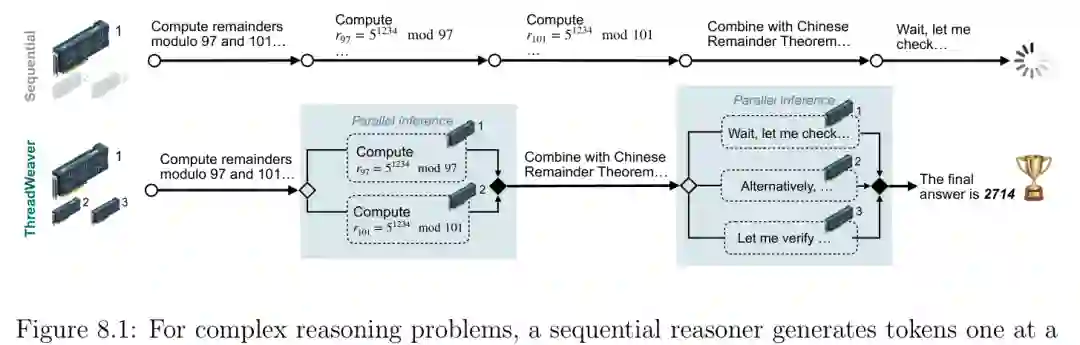
论文指出,复杂推理的延迟通常由关键路径决定。顺序模型逐 token 生成,额外算力很难直接降低延迟;ThreadWeaver 则把某些子问题并行化,用更多计算换取更短关键路径。作者在数学推理基准上显示,ThreadWeaver 可以接近顺序强化学习基线的准确率,同时降低关键路径 token 延迟,并在部分问题上取得明显加速。 ThreadWeaver 的工程价值在于它不要求重写底层推理引擎。通过特定轨迹格式、训练数据构造和推理时请求调度,模型可以在普通 LLM API/推理服务上模拟 fork-join 结构。这让并行推理从一个概念变成更可部署的系统形式。
六、统一观点:多智能体不是堆模型,而是组织计算
这篇论文中的“多智能体”不是简单地把多个模型串起来,也不是让多个聊天机器人互相投票。更准确地说,它研究的是如何组织计算:哪些部分由 LLM 规划,哪些部分由视觉模型执行,哪些部分由检测器验证,哪些部分由推理线程并行探索。 在视觉任务中,多智能体表现为解析器、布局生成器、扩散控制器、检测器、修正器、局部描述器之间的协同。在推理任务中,多智能体表现为父线程、子线程、并行分支和合并节点之间的协同。二者看似不同,但背后的思想一致:复杂任务需要可分解、可检查、可组合的执行结构。 这也解释了为什么论文标题是“Task Decomposition with Multi-Agent Systems”,而不是某个单一模型名称。作者真正关心的是一种 AI 系统范式:模型能力越强,越需要好的任务表示和计算调度,把复杂目标拆成模型能够可靠完成的步骤。
七、未来方向
论文最后讨论了若干开放问题。首先,任务分解需要更可靠的中间表示。视觉布局、动态场景、局部描述和并行推理轨迹都可能出错,系统必须能验证这些中间结果,而不能默认它们总是正确。 其次,多智能体系统需要更好的信用分配。生成失败时,是规划错了、执行错了、检测错了,还是修正策略错了?并行推理失败时,是子线程探索方向错了,还是合并策略错了?没有清晰诊断,就很难稳定改进系统。 第三,效率与可靠性需要共同优化。任务分解会引入额外调用、额外模块和额外状态,不能只看准确率,还要看延迟、成本、内存、可维护性和部署复杂度。ThreadWeaver 的意义就在于把并行推理与实际推理引擎约束放在一起考虑。 第四,未来的多智能体系统需要更强的自适应能力。系统不应固定执行同一套流程,而应根据任务难度、约束类型和当前不确定性决定是否分解、如何分解、调用哪些工具、分配多少计算。
八、结语
这篇 Berkeley 博士论文把视觉生成、局部视觉理解和语言模型并行推理放在同一条主线上:复杂 AI 任务的关键,不只是更大的模型,而是更好的任务分解。语言模型可以规划,视觉模型可以执行和感知,外部模块可以验证,推理线程可以并行搜索;当这些角色被组织成协同系统时,模型就更有机会解决单体生成难以稳定完成的任务。 从 LMD 到 LVD、SLD、DAM,再到 APR 和 ThreadWeaver,论文展示了一条清晰路线:把隐式意图变成显式结构,把一次性生成变成可检查流程,把串行推理变成可并行计算。对于正在走向真实部署的 AI 系统,这种“组织计算”的能力,可能会和模型规模本身一样重要。
引言
在汲取俄乌冲突期间所获多项经验教训与情报之后,已明显需要将反小型无人机系统(C-sUAS)训练纳入每一支部队。尽管已有若干有助于应对这一新兴威胁的条令参考——如美军ATP 3-01.81《反无人机系统》——但无人机系统的用法迭代之快,堪比操作员敲下一行代码。在欧洲战区美军与北约盟友都在使用这些无人航空器(UAV);虽然这类小组的进攻端训练始终在推进,但应对该威胁的防御训练与资源却严重匮乏。战术层级各级指挥官需将传感器能力与搭载动/非动能毁伤手段的小型下车分队一并纳入考量,以应对这一日益增长的威胁。
观察
美军"斯特劳特中士"平台列装第5-4防空炮兵团(5-4 ADAR)操作员已近四年,是加入机动部队的旗舰型机动短程防空(M-SHORAD)资产。其配备的30毫米链式炮(XM914)与同轴M240机枪,使"斯特劳特中士"车组得以提升对地面车辆的生存能力。而TC 3-01.28(《M-SHORAD射击大纲》)的发布则揭示出一个倾向:仍以打击地面目标为主,仅在表6资格考核中包含两个空中目标课目。
在多场美国陆军欧洲与非洲司令部(USAREUR-AF)演习及连级野战训练演习(FTX)中,"斯特劳特中士"平台主要承担静态防御角色。虽然短程防空载体已从"复仇者"武器系统升级,但其战术、技术与程序(TTP)仍与反叛乱(COIN)战争中的基地防御行动相差无几。然而,随着智能化无人机威胁日益凸显,反叛乱时期沿用的TTP在大规模作战行动(LSCO)中将失效。
讨论
面对持续膨胀的无人机威胁,引入创新技术与TTP已是当务之急。
"斯特劳特中士"动能与非动能TTP
在反叛乱环境下,静态基地防御成为短程防空能力的标准作业程序(SOP)。当我们转向大规模作战行动并持续列装"斯特劳特中士"武器系统时,静态防御不再是为机动部队提供支援的首要关注点,尤其是在应对国家与非国家行为体操控的第1、2类无人机时。
"斯特劳特中士"的能力不仅提升了整个战场行动区(AO)的防空存在,还为指挥官提供了更强的空中威胁态势感知。XM914型30毫米链式炮与同轴M240机枪可抵御敌方地面威胁,"毒刺"导弹载荷则对敌空中资产形成足够覆盖。随着近炸引信30毫米弹种的列装,"斯特劳特中士"对抗第1、2类无人机的能力进一步增强,且无需消耗昂贵且有限的"毒刺"导弹。将"斯特劳特中士"编入机动部队,可通过动能毁伤手段压制或摧毁敌方小型无人机或旋翼资产,持续保障战场机动自由。
至于"斯特劳特中士"带入战场的非动能能力,目前高度依赖车内人员配置。现行编制为三人车组(驾驶员、炮手、车长),人员下车实施反无人机交战的机会有限。增设第四名乘员(副炮手)可解决此问题。车上增配一名士兵,不仅能提高车载动能武器再装填效率,还可使小组实施下车非动能交战。车长由此获得更多决策时间,并利用建制前方地域防空(FAAD)平板继续履行指挥控制(C2)职责,监控空域并引导交战。
随车列装"无人机克星"(Drone Buster)与"智能射手"(Smart Shooter)后,炮手与副炮手可从"斯特劳特中士"下车,机动至更合适且隐蔽的位置。依据既定标准作业程序与交战规则(ROE),车组可选择以"智能射手"实施动能打击,或以"无人机克星"实施非动能效应。通过在每个"斯特劳特中士"战斗阵地叠加本地化分层防御概念,最终可在车组与敌对第1、2类无人机之间拉开更大交战距离。我们持续看到乌军通过为小型无人机加装火箭、榴弹与碰炸炸药,成功用于打击重装甲车辆。"斯特劳特中士"下车分队的早期交战能力,将使载具与车组在面对此类战术时拥有更高生存概率。

——2025年1月30日,加利福尼亚州欧文堡国家训练中心25-03轮训期间,配属第1步兵师、由第1骑兵师第6营第56防空炮兵团(6th Battalion, 56th Air Defense Artillery Regiment, 1st Cavalry Regiment)所属美军士兵演练使用"无人机克星"打击敌军。(Spc. Marques Martinez 摄,国家训练中心作战大队)
提升传感器态势感知
"斯特劳特中士"虽增强了动/非动能能力,但在其他维度仍可赋能战场。四部多任务半球雷达(MHR)使"斯特劳特中士"能够探测载具周边10公里半径内的本地空域;加装前方地域防空指挥控制(FAADC2)平板后,车长可获得态势感知并将可重构集成武器平台(RIwP)调转指向任一侦获航迹。这不仅为电池级/营级作战中心(BDOC)提供更多态势感知窗口,也促进火力单元层级的任务指挥实践。
传感器能力提升的意义不止于"斯特劳特中士"车组,对静态阵地或随机动部队运动的战场指挥官同样适用。对"哨兵"(Sentinel)、Q-50、KuRFS等既有传感器的持续升级,增强了对第1、2类小型无人机的感知能力。但所有筹划者都必须面对战场上恒常不变的变量:地形。尽管这些雷达对指挥官与操作员而言是无价资源,但物理上无法绕过巨型地物,也无法突破单部雷达的距离上限。这正是"斯特劳特中士"应被增补利用、充当战场空域"额外一双眼睛"之处。
在"欧洲保证,威慑,加强行动"(EADR)期间,5-4 ADAR向东线多国部署部队,排级军官面对各类地形:城市区域受制于大型建筑与城市地貌,开阔跑道则能让传感器发挥最大有效射程;山地地形造成雷达波束盲区,在行动区内形成"阴影"与"死区",小型无人机可贴地钻入雷达覆盖空白。"山地作战TTP"之一便是在某处山谷内预先展开"斯特劳特中士",间歇性开启MHR,以填补地形造成的死角。
这一战术在静态防御行动中已被验证有效,在大规模作战行动环境下更具延展意义。"斯特劳特中士"搭载的MHR可为战场指挥官额外延伸10公里态势感知纵深——无论是拓展传感器最大有效距离,还是覆盖地形造成的死区。该战术的风险考量在于:由四名士兵组成的单车车组可能孤悬于部队前沿(FLOT)之外,且无安保兵力可依托。此时,短程防空乘员(14P)在被动防空措施上的训练与经验最为关键。车组发现,从周边环境取伪装网与植被敷设于载具,可削弱敌方ISR侦测能力、降低战斗阵地展开时的热信号,从而提升生存率。配合刻意规划的电磁辐射时间表与预设跳跃阵地,"斯特劳特中士"可转化为具备"指向-提示"(slew-to-cue)能力的机动传感器,同时为车组增加生存机会。通过横向借鉴全军既有TTP——如侦察SOP、"海马斯"火力单元"打了就跑"战术、辐射抑制措施——"斯特劳特中士"车组融入机动部队时可更高效。
建议
对"斯特劳特中士"营的前瞻建议是:推动编制与装备修改表(MTOE)变更,为每车增设一名乘员;开发提升传感器能力的新战术;列装附加设备以补强单车车组战力。
"斯特劳特中士"车组的MTOE编制应由三人增至四人。这不仅能减轻车长工作负荷,还能腾出更多决策空间、形成更可控的作息循环,并支撑下车作战。与此同时,应为每车组配齐下车动/非动能选项——增配"无人机克星"与"智能射手"。建议每车组追加一台"无人机克星"与一台"智能射手",由炮手与副炮手分担,以延伸战场固定站点效应器的作用半径。
在运用新战术以提升传感器能力与态势感知方面,必须撬动超视距通信系统。"移动用户目标系统"(MUOS)能力在本地FTX与 combat training center(CTC)轮训中持续被识别为刚需。为"斯特劳特中士"改装双联PRC-162电台架,可同时实现超视距通信与经由FAAD内网的数据传递,构建更完整的联合作战图景。
为每辆"斯特劳特中士"车组列装安卓战术突击套件(ATAK)系统,并借后续软件升级实现FAAD互操作,可使下车人员充当雷达可能无法覆盖的瞭望点位"人肉传感器"。操作员胸前终端(EUD)可与雷达空情交叉比对、与地面目视相互印证。目标是能在终端上标定飞行高度低于雷达画面的疑似第1、2类无人机,向部队前沿与战术作战中心(TOC)内的友军提供预警。

——2018年4月16日,德国格拉芬沃格靶场Aachen营地,配属LSTAR软件的Q-50是美国陆军反目标捕获雷达的软件变体,用于探测与跟踪低空无人机。(Spc. Miguel Pena 摄)
结论
尽管全球各战区关于第1、2类无人机威胁的运用与反制已积累大量经验教训,但若不付诸行动,便仅止于"经验"二字。这是一个持续演进的战争领域,任务成败将取决于筹划者与操作者是否手握恰当工具,以提升战场友军生存率。这是清晰且持续的威胁,正迅速成为战争的未来形态;而我们拥有资源与专业能力,不仅在战场生存,更能打赢。
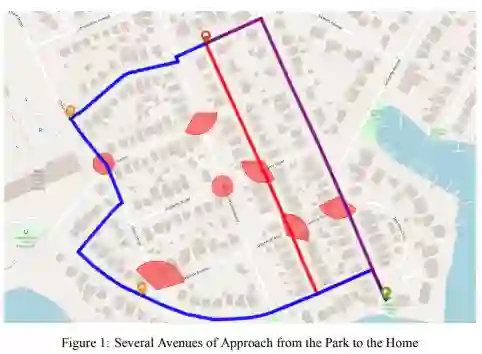
军事单位常需在城市环境中机动,既要完成运动又要最大限度降低被监控系统探测的风险。本项目旨在开发一种自动化路径规划模型,在给定起点、终点及已知监控威胁清单的条件下,最小化监控探测概率。我们利用OpenStreetMap的开源数据构建涵盖步行、骑行与驾车交通网络的多层图,将监控设备风险按距离加权,并由用户自定义风险优先级进行建模。所采用的标号设定算法在考虑现实交通方式转换限制的同时,兼顾行程时间与风险的最小化。模型可根据用户需求调整,输出在隐蔽性与速度间取得平衡的路线。本研究通过提出并演示一种面向对抗环境下多模态路径规划的新型概念验证框架,为路径规划知识体系增添了新的内容。
将己方部队在正确时间部署至正确位置以遂行军事行动,其基础在于机动。准时抵达决战要点,离不开快速而有秩序的机动(美国陆军部,2023)。除穿越居民区伴随的典型危险外,闭路电视、自动车牌识别及射频探测器等监控技术的日益广泛使用,进一步加剧了在对抗区域机动的复杂度。在传统城市环境下,面对此类威胁进行路径规划是一项艰巨任务——评估环境、定位威胁、识别潜在接近路线并择优选取,所需时间随所穿越城市环境规模呈比例增长。本文提出一种自动化路径规划流程,在兼顾威胁与行程时间的同时,充分利用多模态交通方式。该模型接收起点、终点与监控威胁清单,输出最安全路线、最快路线,以及一条平衡隐蔽性与速度、可遍历步行、骑行与驾车网络的折中路线。
本研究的核心概念是多模态交通网络路径规划与对抗性网络路径规划。两类主题各自已有文献积累,而本研究的新颖之处在于将"对抗性网络中的多模态路径生成"二者结合。
多模态路径规划
A∗算法(Hart, Nilsson, & Raphael, 1968)等经典图路径规划算法并不直接适用于多模态交通网络——后者在单一网络中集成了多种出行方式。在传统最短路径问题中,经典算法假定每个节点关联单一代价,且边权仅取决于路径中当前节点与边。反之,多模态交通系统中的出行代价与路径可行性,还取决于当前交通方式及转换惩罚等附加因素。因此,多模态网络中的路径规划涉及寻找具有合理方式转换序列的最短路径(Bast et al., 2016)。
如Bast等人(2016)所述,多模态网络通常采用多层图结构,每层代表单一交通方式对应的网络,层间链接代表方式转换。为遍历此类图,多模态路径规划常被表述为资源约束最短路径问题的变体,其路径可行性取决于沿路径累积的资源消耗。Irnich与Desaulniers(2005)指出,标号设定算法常用于求解此类问题;Ma(2014)在此基础上扩展,提出了一种基于A∗算法加速技术的标号设定算法。
对抗性网络路径规划
对抗环境下的路径规划将最优路径寻找问题扩展至敌方能够影响并干扰机动的场景。经典路径规划中,规划者通常优化距离、时间或成本;对抗性网络通过引入风险改变了这一思路,风险会影响候选路线的可取性。由此,优化目标从单准则转向多准则,即在效率与威胁暴露间取得平衡。近期若干研究从军事视角探讨了对抗性网络中的路径生成:Hernon等人(2025)对比了两种用于军事后勤、在时间与风险间权衡的对抗网络遍历路径生成算法,将风险定义为敌方行动因己方部队受损足够严重而阻断机动的概率;类似地,Kendall、Killian与Koch(2023)提出了一种方法,在给定起讫点与近似搜寻者位置条件下,基于高程与植被GIS数据构建的网络上寻找最短路径,并根据规避方与搜寻者的距离、植被遮挡及规避方运动方式定义探测概率。这些方法展示了如何通过定义风险并将其纳入目标函数,将经典最短路径问题扩展至对抗性网络。
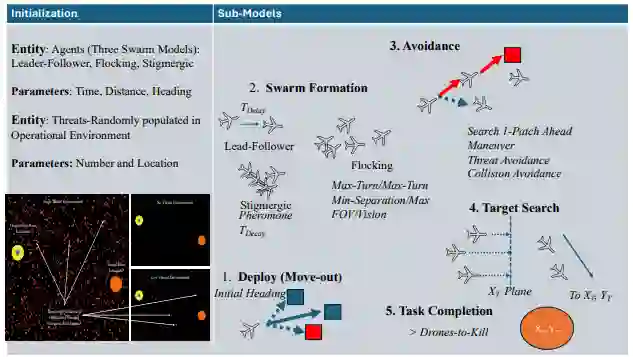
本文提出一种新型计算仿真框架,旨在基于代智能体建模与仿真(ABMS)方法,评估三类集群无人机模型的涌现行为。这三种模型分别为:基于Bruckstein蚁群理论的领导-跟随者集群模型、基于简化Reynolds“类鸟对象”模型的集群模型,以及基于信息素协调的共识响应模型。仿真的核心目标在于评估上述模型在四种独立场景下,将预定数量的各类无人机投送至目标区域的性能表现,累计完成五万次独立仿真试验。各场景设计旨在系统性地考察集群模型性能如何响应代理层参数与外部环境因素的变化。仿真结果揭示了模型间存在统计学显著差异。数值分析与可视化手段进一步呈现了各集群模型在布满随机障碍物环境中行进时所展现的复杂行为特征。
此外,本研究通过计算空间熵与行为熵,对各模型所表现出的自适应行为程度进行了量化。这种对熵的创新性应用,为刻画不同类型集群的涌现行为与稳定性提供了定量依据。其中,集群模型取得了最高的任务成功率,在所有威胁等级下均表现出鲁棒性,但对任务所需无人机数量的增加较为敏感;领导-跟随者模型在高威胁密度环境中面临挑战,但在任务要求更高无人机数量时成功率有所提升;简化的共识响应模型表现欠佳,且信息素挥发率对其性能影响甚微。通过整合统计分析与基于熵的度量指标,本研究构建了一个可复用的ABMS框架,用于分析集群性能,支持基于场景的决策制定与系统优化。研究成果深化了对集群行为机理的理解,丰富了集群智能领域的知识体系,并为无人机集群系统的设计与部署提供了切实可行的实践路径。
后续章节安排如下:第二章梳理相关研究,回顾集群的本质特征及其在物理系统中的潜在应用;探讨基于Reynolds类鸟对象模型与Bruckstein蚁群理论的数学原理,以解析无人机集群的集体行为;并阐述验证与确认模型及ABMS仿真构建的方法论。第三章阐述研究与实验方法论。第四章详细讨论基于概览、设计概念与细节(ODD)协议的模型开发过程,并探讨为确保实验完整性所必需的模型验证框架。第五章展示仿真事件的分析数据与结果解读。第六章则提出对当前基线实验设置的改进方案,以支持该领域研究的持续与拓展。第七章总结全文并得出结论。文末附有参考文献。附录A呈现基于NetLogo平台编写的程序代码;附录B概述NetLogo代码的功能模块,描述模型执行的具体操作;附录C为本研究分析环节所使用的R语言程序文件;附录D列举了数值分析与熵计算的代表性输出文件。
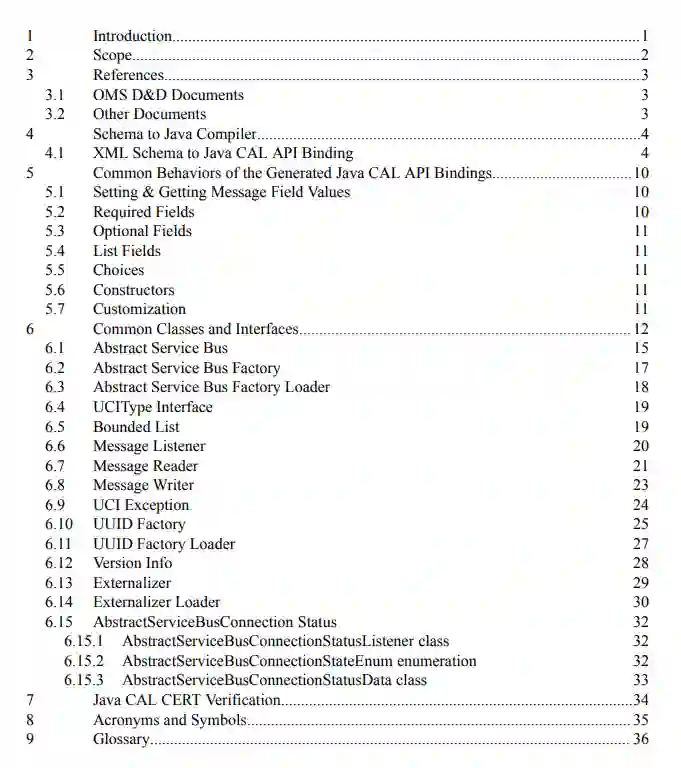
开放式任务系统(OMS)是一套将子系统与服务集成至任务包的非专有开放架构标准。本文件为OMS模式至Java接口的顶层规范。除非另有说明,Java关键抽象层(CAL)实现要求应遵循CAL规范中列出的通用CAL要求。此处所列条目旨在针对Java CAL实现对要求进行细化或澄清。Java CAL作为开放计算环境(OCE)的一部分提供。OCE应能够运行Java长期支持版本,当前推荐为Java Standard Edition 11;因此,Java CAL在设计实现时应考虑能够在Java 11虚拟机上运行。
本文件为OMS模式至Java接口的顶层规范。Java CAL在抽象服务总线与OMS服务、子系统及隔离器之间提供接口。这些接口采用开放的、标准化的非专有接口定义,同时将技术实现与接口解耦。本OMS标准为未来技术升级提供支持,其灵活性使得平台、子系统及服务提供商能够面向未来问题提供创新且具有竞争力的解决方案。
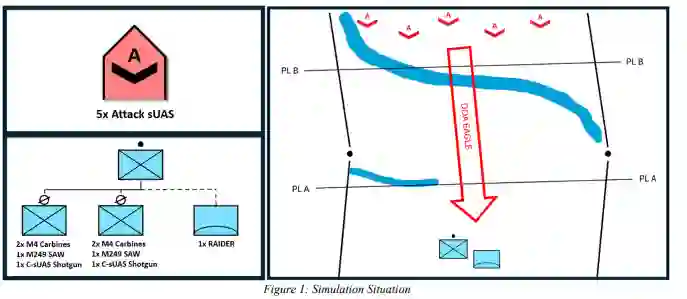
本项目聚焦于通过基于模型的系统工程方法,在排级单位集成与实施反小型无人机系统技术,以支持作战实验。美国陆军“概念聚焦作战实验”汇集了多种反小型无人机系统技术,项目组利用系统建模语言对这些技术进行了筛选与建模。MBSE团队构建的模型与方法论将各项技术分解为其行为与组件,使能够全面掌握并理解其能力。块定义图等模型将整体系统分解为基础构件,而活动图则捕捉了相应系统的动作或行为。在利益相关方与指导教师的指导下,所开发的模型清晰、分层地展示了应对现代战争中无人机威胁的替代性解决方案。
关键词:小型无人机系统;反无人机系统;系统建模语言;步兵战士仿真系统
1. 引言
1.1 背景
对手小型无人机系统的迅猛增长对美国部队在现代战场上构成了重大威胁。作为回应,美军正测试多种反无人机系统技术,包括“无人机克星”、“移动式低速低空无人机综合防御系统”以及“天景”系统等(Paulsen, 2025)。通过与“作战聚焦作战实验”的合作,本毕业设计项目对四种反小型无人机系统技术进行了建模,分别是:远程自主综合防御交战漫游车、双光谱遮障筛查系统、探测-跟踪-识别系统以及多光谱伪装披风。在俄乌战争中,乌克兰陆军已设立独立的无人机军种——“无人系统部队”(Kirichenko, 2025)。现代战场正经历快速变革,各国军队的无人机体系必须适应这些新变化。未能适应者将在战争中被淘汰。鉴于敌方无人机系统能力增长迅速且杀伤力极强,轻步兵排亟需有效的反无人机能力。本毕业设计项目旨在通过基于模型的系统工程方法,对轻步兵排反无人机能力的设计与实施进行建模,并就排级作战行动的调整提出建议,以支持“概念聚焦作战实验”。
1.2 美国陆军应对策略
美国陆军“部队结构转型”计划将原训练与采办司令部重组为“转型与训练司令部”,负责统筹全陆军实验与训练指导工作(T2COM, 2025)。在转型与训练司令部框架下,陆军未来司令部被赋予重任,通过“概念聚焦作战实验”验证技术,弥合美军能力与近邻对手之间的差距(FUTURES and CONCEPTS COMMAND, 2026)。“概念聚焦作战实验”致力于通过集成实验推动陆军现代化,涵盖从步兵排级到战区级指挥控制、跨域火力以及分析系统建模与仿真等领域。MITRE等防务企业提供各类技术、研究与假设,指导“概念聚焦作战实验”的开展,为指挥官提供必要信息,以便将这些技术与所属部队集成,提升杀伤力。“概念聚焦作战实验”旨在验证新技术效能,提升士兵战场作战效率,并促进各军兵种与团队间的协作。
2. 方法论
问题陈述如下:希望通过基于模型的系统工程方法,对轻步兵排反无人机能力的设计与实施进行建模,并就排级作战行动的调整提出建议,以支持“概念聚焦作战实验”。该问题陈述旨在利用系统建模语言,从设计与行为两个维度对拟在“概念聚焦作战实验”中测试的技术进行建模,使实验团队能够最优设计防御敌方无人机的场景。与利益相关方的互动有助于识别“概念聚焦作战实验”中的关键难点,突破限制,从而开展仿真以模拟现实场景,并为轻步兵排提出改进建议。
作为方法论的初始步骤,确定了支持“概念聚焦作战实验”的技术清单。技术输入包括:远程自主综合防御交战漫游车、双光谱遮障筛查系统、探测-跟踪-识别系统以及多光谱伪装披风。陆军“接触转型”重点与国防采办变革相结合,要求采用动态方法理解新技术对部队的集成影响与效能。特别是,必须理解新技术对战术、技术与程序以及部队编制结构所引发的变革。陆军正通过从静态、预计划实验(如旧版“概念聚焦作战实验”)向动态、集成训练与转型活动的转变来应对这一挑战。这种新方法需要一种动态的分析、记录与沟通实验中发现的变化与经验教训的手段。本文所述的基于模型的系统工程方法为实验人员提供了动态能力,使其能直观了解并实时更新部队编制与作战行动如何受新技术集成的影响。这使他们能够清晰记录测试用例与结果,从而有效推动制度性变革。未来的工作将扩展详细方法,以便在训练与转型演习中运用此方法。
使用了两种系统建模语言图:块定义图与活动图。块定义图以分层方式展示技术,帮助全面理解系统结构。这有助于“概念聚焦作战实验”团队理解并审视其关注的标准,如模型中的速度、重量与生存性等。作为模型输入的一部分,利益相关方设定的评估标准已成为模型的组成部分。这些标准包括生存性、速度与重量。利益相关方优先考虑的价值指标是技术识别敌方无人机的速度,以及技术做出反应并实施对抗的速度。随后,团队通过活动图对每种系统的行为进行建模。活动图使用户能够理解技术在给定场景中的运作方式,以及士兵与系统之间的交互。活动图还展示了各项价值在给定场景行动过程中的相关性。
技术通过系统建模语言图展示的输出及其价值,构成了理解各系统工作原理的模型。每个模型将系统分解为“概念聚焦作战实验”团队需考虑的组成部分,并构建出融合评估技术与步兵排结构的图表。团队从活动与交互模型中得出的另一项输出,是理解士兵运用技术时可能面临的场景与决策。这些活动与交互模型将有助于界定仿真范围,从而准确模拟排级单位防御无人机所需的要素。
模型的约束与局限性在于,研究主要侧重于被动防御建模,限制了考虑对敌方无人机的主动防御能力,唯一的主动防御技术是远程自主综合防御交战漫游车。此外,仅能获取与“概念聚焦作战实验”团队商定技术的相关数据。为合理仿真技术,与“概念聚焦作战实验”团队需对许多数值进行假设。假设第二组及以上级别的无人机资产将由连级单位应对。第二组无人机重量约21磅或以上,最大速度与高度均高于第一组。其次,假设对手无人机资产具有开源文献所述的基线抗毁性,或类似于美国无人机能力。还假设公开发布的非密研究平台上的技术规格具有合理准确性。最后,假设“概念聚焦作战实验”团队制定的被动防御场景即为技术的实际运用方式。
2.1 建模方法
正在对最适合对抗第一组无人机资产的替代方案这一复杂问题进行建模。第一组无人机重量低于5磅,电池续航与飞行距离有限,相较于其他组别无人机资产,属于更小的无人飞行器。为此,使用Magic Systems: Systems Architect建模平台。选用该系统的原因在于其易于理解与可视化,且与系统建模语言具有良好的兼容性。建模此问题的目的是提供透明、易懂的技术快照,展示技术间的交互及其在对抗无人机资产时的整体价值(Estefan, 24)。利用该平台,对四项技术进行了建模:远程自主综合防御交战漫游车、双光谱遮障筛查系统、多光谱伪装披风以及探测-跟踪-识别系统。
2.2 系统建模语言
使用系统建模语言具有多重优势。其核心优势在于提供了清晰、详细的沟通渠道,且陆军当前正运用系统建模语言对当今世界与任务工程集成的复杂问题进行建模。同样,该语言与平台便于技术替换,以测试不同替代方案并评估其价值。系统建模语言包含三大支柱,本团队聚焦其中两大支柱构建模型。这三大支柱分别是结构、行为与需求(Delligatti, 5)。聚焦于结构与行为支柱,分别通过块定义图与活动模型进行建模。
3. 建模
3.1 块定义图
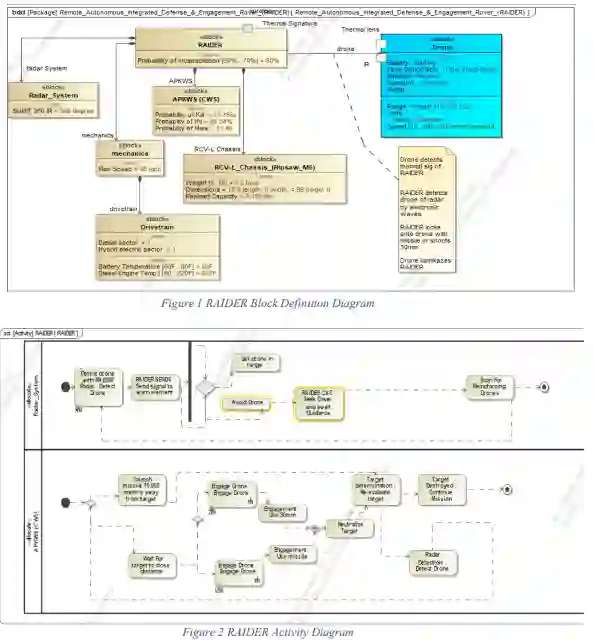
块定义图为团队所选技术在轻步兵排内的整体建模与集成提供了显著优势。通过系统建模语言将各项替代方案分解为其组成部分与价值属性。块定义图允许用户展示事物的结构,即展示构成块的组件与价值属性。在课题中,为每项技术绘制了图表,不仅展示其构成组件,还展示与之对应的价值属性。远程自主综合防御交战漫游车被分解为不同模块,如雷达系统、集装箱化武器系统、轻型底盘、机械装置与传动系统。所有模块均具有不同的价值属性,有助于定义与阐明模型。蓝色标记的“无人机”模块描绘了敌方无人机,并通过端口与注释展示了其与远程自主综合防御交战漫游车的关联关系,表明了各元素的相互识别机制。对于其余三项技术,也建立了类似的图表,描绘了各组件及其对应的价值属性。块定义图的重要性在于,它使利益相关方能够审视其技术的结构,以及团队在设计过程中所做的假设与变通。这些假设包括寻找具有相似电池寿命与柴油输入的同类设备进行插值,以准确模拟远程自主综合防御交战漫游车的性能。块定义图是模型最基础的结构模块,奠定了组织的基石与互联性,使项目团队能够在此基础上构建更复杂的模型,深化问题集的复杂度与深度(Delligatti, 24)。
3.2 活动图
作为块定义图的补充,活动图不建模结构,而是建模行为。这些模型直观展示了系统在“概念聚焦作战实验”团队制定的各场景中的响应方式。其中一个典型场景是:部队在任务巡逻途中遭遇敌方第一组无人机资产接触。针对每项技术,模拟了对区域内无人机威胁的响应流程。每项技术的行为被分解至不同的泳道,以显示技术的哪个组件正在执行何种活动。每个活动由一个圆角矩形表示,每个泳道拥有一个起始节点与一个终止节点,其间包含多个活动。这些特定图表采用迭代格式设计,以展示对第二架无人机或增援要素的响应。此类模型对于确定建模的实地测试环节至关重要。虽然此种建模方式无法获得与仿真同等的数据量,但它提供了更为简洁、清晰的概览,且当与块定义图结合时,能够提炼出理解系统所必需的关键数据,例如技术对威胁的响应方式或可行的特定行动方案。活动图作为仿真的建模支撑,使利益相关方与团队成员能够审视技术可能采取的路径。这对于陆军制定战术、技术与程序具有至关重要的意义。
3.3 模型的交互
块定义图与活动图相互关联。每一项活动均可追溯至特定的模块,如表1“分配矩阵”所示。第一列代表正在发生的活动,如图2所示。第二列显示该活动的类型或其归属。除首行外,第一列的所有内容均为活动,第二列全部标注为“行为”,表明该活动是技术正在执行的一种行为类型。第三与第四列分别显示活动的分配来源与去向。通过这两列,可以清晰地看到块定义图与活动图所描述的物理结构是如何与活动相关联的。如第2.2节所述,每个活动图均包含泳道,第三列显示了活动被分配至哪个泳道(如适用),这有助于追溯与组织,明确各组件负责的具体任务。这一逻辑适用于所有技术与图表。例如,“重新评估目标”活动被分配至“集装箱化武器系统”泳道,而“态势评估”活动则被分配至“披风活动图”及其他模块,同时也分配至“集装箱化武器系统”泳道,这表明两项技术在相似模式下使用了同一活动。第三列“分配自”显示了该活动与其他活动的关联。这对于以更清晰、更有条理的方式查看活动图中发生的事件序列至关重要。分配矩阵的重要性在于其可追溯性。构建如表1所示的矩阵,使利益相关方与团队能够追溯所开发模型所有组成部分的来源。这至关重要,主要原因在于支持实验。若团队需要替换某个模块或活动以获取不同或更新技术的测试结果,可以查阅矩阵,评估其对整体模型的影响。通过这种方式,它赋予了灵活性、测试的便捷性以及建模替代方案的能力,从而在仿真中探寻最优解决方案。
表1 分配矩阵
| 名称 | 归属 | 分配至 | 分配自 |
|---|---|---|---|
| RAIDER | 行为 | RAIDER 远程自主综合防御交战漫游车 (RAIDER) | RAIDER |
| 重新评估目标 | 行为 | APKWS (CWS) | 目标被摧毁 |
| 扫描增援无人机 | 行为 | 雷达系统 | |
| 寻找掩护并等待指令 | 行为 | RCV-L 底盘 (Ripsaw M5) | |
| 发送信号警告分队 | 行为 | 雷达系统 | |
| 态势评估 | 行为 | 活动披风;继续执行任务 (上下文 APKWS (CWS));交战无人机;等待目标进入距离 (上下文 APKWS (CWS));总部武器 | 无线电上报上级 |
| 目标被摧毁 | 行为 | 目标被摧毁;重新评估目标 (上下文 APKWS (CWS));压制目标;远程自主综合防御交战漫游车 (RAIDER) 无人机 | 目标被摧毁 |
这些技术的系统建模语言模型元素可映射至构造仿真的输入参数。这种映射并非完美的一一对应,因为建模数据并不总是直接对应于仿真输入。为展示此效用,开展了一项集成练习,将系统建模语言模型元素映射至仿真输入。块定义图中的价值属性对应于“步兵战士仿真系统”数据库中构建的能力参数,例如,远程自主综合防御交战漫游车的杀伤概率属性映射至“步兵战士仿真系统”数据库的失能概率。相应地,活动图映射至“步兵战士仿真系统”任务规划器。活动图与块定义图均从不同视角为分析各类技术层面提供了价值。能够团队协作撰写同步报告,深入剖析每项技术的优势与短板。这些报告也使团队更深入理解技术在“概念聚焦作战实验”设定的“遭遇无人机接触后响应”场景中的行为表现。这些信息被用于完善活动图,并在仿真中提高士兵动作的准确性。最终,对结果进行解读与清洗,为“概念聚焦作战实验”团队面临的问题提供优化解决方案建议。
4. 结论
4.1 建议
对远程自主综合防御交战漫游车、双光谱遮障筛查系统、探测-跟踪-识别系统及多光谱伪装披风的建模,使“概念聚焦作战实验”的利益相关方能够理解这些技术如何与轻步兵排系统的其他部分交互(见表1)。这影响了陆军及利益相关方在实施新战术技术与程序及开展实验时对技术的认知。陆军运用系统建模语言解决复杂问题,因此以通用语言提供模型,为任务工程概念提供了关键的理解与实用的集成途径,例如在遂行任务时量化替代方案的效能(研究与工程国防部副部长办公室,12)。模型提供了替代方案与结构价值属性,使利益相关方能够斟酌何种方案最符合任务需求。模型是本毕业设计的成果,其所提供的信息(如结构与特性)可为仿真建立基线。正如分配矩阵(表1)所示,模型提供了宝贵的可追溯性信息。这使利益相关方在实验过程中,若希望基于“在不牺牲速度或增加过重负担的前提下,最优对抗第一组无人机资产”的假设进行调整,能够追溯至最细微的细节与层级。总体而言,模型就技术在排级单位的结构与组织方式提出了建议,并就技术在遭遇无人机攻击时的行为模式提供了基础框架。团队为“概念聚焦作战实验”成功建模了四项技术;然而,基于模型与仿真运行的结果,并不存在单一的最优技术解决方案。在寻求特定任务线索(如士兵生存率)时,技术的组合运用通常能取得最佳效果。建议组合运用所建模的技术,例如双光谱遮障筛查系统与伪装披风,并针对拟完成的具体任务线索进行仿真推演。所构建的模型为仿真提供了基础起点,也为活动图所展示的可能战术技术与程序及行动提供了框架。
4.2 未来工作
在未来的工作中,可以引入不同的技术。陆军其他兵种可使用百余种技术。本次研究将自己限定在轻步兵单位可使用的技术范围内。也可以调整排级单位中各项技术的数量。模型的另一项可变更项是所做的假设。假设轻步兵排在气候稳定、无气象影响的条件下使用技术,这在实际环境中极不可能。假设地形类型为无障碍地形,未来可对部队在严重受限地形中的行动进行建模。地形改变可能影响模型结果,导致不同结论。此外,仅能获取公开信息,因此无法对存在的涉密技术进行建模。未来工作需涵盖的另一个主要变量是其他类型的敌方无人机。本次研究使用了第一组无人机,但还存在更具杀伤力与能力的敌方无人机系统。
5. 参考文献
略
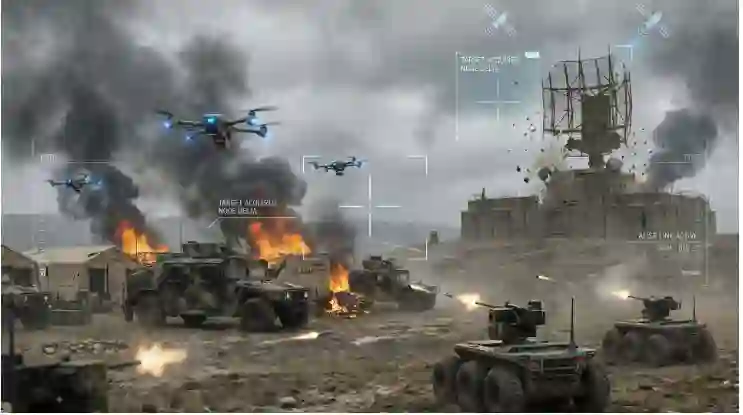
(作者利用Nano Banana AI生成的近未来战场概念图:致命自主武器系统投入使用场景)
在不远的将来,某处遥远战场上,机器的信号取代了人声指令主宰行动。成群自主无人系统在战区内游弋,通过分布式人工智能与网状网络互联。这些系统跨域汇集融合数据,迅速识别敌军编队。顷刻间,一幅实时通用情报态势图生成,清晰标定美军部队位置。昔日需耗时数小时的分析,如今转瞬完成。
敌方人工智能制造虚假信号,诱骗美军雷达,并向情报、监视与侦察(ISR)信息流注入虚拟目标。与此同时,自主ISR系统锁定美军雷达、后勤节点与通信设备,并通过网状网络实时传输坐标。整个旅级战斗队范围内,传感器、打击单元与指挥所同时遭受综合火力与无人机蜂群的精确打击。美军作战力量在数分钟内土崩瓦解。此役胜负由算法裁定,而非命令行事。
这一作战环境并非科幻虚构,而是战争自然演进的写照。诚如卡尔·冯·克劳塞维茨所言,战争本质恒久——激情澎湃、变幻莫测、政治属性鲜明——但其形态从未固化。战争形态由其置身的社会形态及所用技术塑造。昔时驰骋于马背刀光,今朝角逐于代码电路。随着人工智能与机器学习技术的普及,战争形态正加速迈向算法化未来。中国提出的“智能化战争”概念与俄罗斯的“侦察打击综合体”(RSC),皆指向一个日益由速度与自主性定义的战场。在此环境下,对手正积极备战“算法战争”,将自主性本身视为超越人类认知的极限竞争优势。
这一转型的标志之一,便是致命自主武器系统(LAWS)的兴起。此类系统能将感知、目标识别与交战过程近乎同步完成。北京与莫斯科均视AI赋能的自主性为未来战争的核心。中国人民解放军旨在通过调整人类角色——从持续介入转向监督控制,利用机器速度抵消数量或装备劣势,从而夺取认知主导权。相比之下,俄罗斯则致力于构建自动化指挥控制(C2)架构,旨在融合实时感知与精确打击能力。尽管两国尚未完全列装全自主武器,但均在围绕此目标设计条令与系统。这些发展轨迹向美国陆军提出一个根本性问题:面对日益由自主性塑造的作战环境,陆军现有条令流程能否有效运转?
美国国防部已指令陆军为LAWS的部署做好准备。本文认为,陆军现行条令流程——尤其是目标打击方法论——与该要求存在错位,且在算法战争兴起的背景下日益难以为继。自动化感知与数据融合技术的进步,已极大压缩了从探测到交战的时间。然而,陆军条令仍固守于以人类节奏决策的模式。其结果便是信息收集速度与行动响应节奏之间的“速度差”。对手正积极设计自主系统及相关条令,以利用此差距。弥合这一差距,亟需重构陆军条令、编制与训练体系,在合法“人在回路”控制下将LAWS整合进目标打击流程。
厘清致命自主性中的人类控制
根据《国防部指令3000.09:武器系统中的自主性》,LAWS系指一经激活,便可在指挥官批准的约束范围内,无需人类操作员进一步干预即可自主选择并打击目标的武器系统。该指令确立了国防部关于LAWS研发与运用的政策,要求将适当的人类判断纳入武器系统行为的设计、授权与监督环节,允许自主系统在预定作战约束下依指挥官意图执行交战,并要求指挥官监督LAWS的运用,保留干预或终止行动的能力。
陆军目标打击条令已通过指挥官批准的指导(包括目标选择标准与攻击指导矩阵)嵌入了人类判断,将指挥官意图与法律判定转化为约束致命武力使用的条件。因此,问题不在于目标打击中是否存在人类判断,而在于此种判断能否转化为LAWS可执行的格式,并实现指挥官的有效监督。
《国防部战争法手册》阐明,战争法合规性评估于指挥官授权攻击之时,基于当时合理可得的信息进行。陆军目标打击条令通过预先批准的指导将此判断操作化,旨在无需每次交战均重新进行法律审议。然而,在运用LAWS时,同样的指挥官批准判断必须转化为“交战逻辑”——即定义自主系统获授权后如何运作的参数。若无此转化,LAWS便无法以机器速度运行,从而削弱指挥官控制并破坏合法执行。
其结果是政策许可与条令能力之间的错位。政策允许指挥官授权自主执行,前提是其能按要求进行监督与干预。但陆军目标打击条令未提供将指挥官判断编码以供自主执行的机制。这导致陆军即便面对对手通过AI赋能自主性追求机器速度优势时,仍受缚于人类节奏的流程。
对手轨迹:迈向算法优势
这种控制模式的非对称性具有对手深谙于心的作战后果。莫斯科与北京并未等待美国解决LAWS整合问题,而是正积极利用自动化本身作为优势来源。正如爱尔莎·卡尼亚在《PRISM》期刊中所指出的,“算法优势可能成为作战优势的主导性决定因素”,尤其对于那些寻求抵消常规劣势的军队而言。对中国而言,通过算法优势争夺认知优势并非未来战争的辅助手段,而是决胜作战优势的疆域本身。与此同时,俄罗斯则通过其持续演进的RSC追求类似目标,旨在将“传感器到射手”的周期压缩至近乎实时执行。
俄罗斯的算法谱系。 俄罗斯对算法战争的追求并非现代技术演进的产物,而是植根于悠久的理论传承。苏联理论家通过工业化战争实践发展了这一传统,认识到冲突通过相互交织的作战行动展开,其效果随时间累积。亚历山大·斯韦钦强调通过关联作战而非决战来构建战役。格奥尔基·伊谢尔松进一步推进此逻辑,主张战争的特征在于纵深、同时性与对敌系统的破坏。在此视角下,战争成为随时间塑造的过程,而非单一时刻的决断。
远程火力、网络化传感器与自动化处理开始压缩时空,可能消弭常规效应与核效应间的鸿沟。尼古拉·奥加尔科夫元帅洞察到此点,并聚焦于融合这些能力以实现快速、纵深、大规模打击。由此逻辑催生了后来被称为RSC的架构:一种旨在比对手响应更快地完成决定、探测与交付的火力体系。当代分析家曾指出,苏联在认识自动化战场影响方面“甚至可能领先于西方”。
这些思想并未随苏联解体而消失,而是在俄罗斯围绕精确打击与自动化C2重建军队的过程中重现。至2010年代初,高级规划者再度聚焦于信息技术如何压缩战场时空。俄罗斯总参谋长瓦列里·格拉西莫夫于2016年捕捉到此转变,描述了一种以“远距离、非接触行动”为特征、机器人系统作用日益增长的战争形态。格拉西莫夫的指示明确:未来部队将日益依赖自动化,而非人类节奏的控制。
乌克兰战争在实践中印证了这一谱系。英国皇家联合军种研究所分析指出,俄军“射手”等火力控制系统正将多源传感器信息整合进数字架构,支持跨层级的梯次RSC。俄军日益采用互联的“侦察-火力回路”,而非线性的杀伤链。巡飞弹常作为此过程的动能终点,目标探测后数分钟内即完成交战。俄乌间的此类交锋已成为“竞争性决斗”,先识别目标的一方往往率先实施杀伤。

(作者利用Nano Banana AI生成的通过自动化指挥控制连接传感器与打击单元的侦察打击综合体概念图)
中国的认知控制。 中国的发展路径在方法上有所不同,但战略意图一致。如果说俄罗斯的路径反映了战争科学理论的渐进机械化,那么中国的“智能化战争”概念则代表了一种围绕认知主导权重构冲突的刻意努力。解放军认为,这需通过“人机协同”实现。在解放军条令著述中,智能化战争不仅由自主平台定义,更由感知、认知与行动的系统级协同来主导对手决策过程。
此方法植根于长久塑造中国军事思维的核心理念,尤其强调通过掌控信息获取先见之明、实施欺骗及谋取优势。这些主题在孙子等著作中反复出现,旨在武力运用前塑造对手决策。美国陆军外国军事研究室的析确认,解放军当代概念在适应现代技术的同时,仍保留了此逻辑。这些思想持续影响中国作战思维。官方条令文献如《军事战略学》强调信息化战争中的信息主导与心理效应。后续解放军关于智能化战争的著述,则日益通过舆论斗争、心理攻防与认知对抗,将竞争延伸至认知域。
在此基础上,解放军将智能化战争构建为一种“体系破击”方法,旨在通过算法赋能的流程压缩观察、决策与行动周期。中国条令著述将此方法与美军所依赖的“规模与体量”进行对比,主张以节奏主导战胜体量。在此逻辑下,自主侦察与人机协同旨在以超越单纯人类认知的速度运行,在目标打击中生成决定性优势。
为实现此优势,解放军并未将AI视为规划与C2的附属工具,而是将其视为C2的认知支柱。指挥官提供意图与约束,自主系统则执行探测、优先级排序与序列编排。通过减少摩擦并压缩决策周期,速度本身成为强制压力的来源。人类判断并未消失,而是前移至流程更早阶段,通过监督而非逐次行动来塑造执行。其意图不仅是自动化,更是对围绕算法协调重构战争。
速度差
速度差是机器节奏执行与人类节奏控制之间非对称性的作战体现。俄罗斯的RSC与中国的智能化战争模型,均旨在通过自主系统将决策、感知与打击整合为近乎同步的执行过程。相比之下,陆军的目标打击体系仍围绕目标打击流程中顺序化的人类验证与审批构建。因此,限制因素并非感知或计算能力,而是管控行动的流程本身。
近期实验表明,AI赋能工具与自主性可显著压缩杀伤链的部分环节,但仅限于“人在回路”条令允许的范围。第18空降军利用“梅文项目”将“传感器到射手”周期从724分钟缩短至约20分钟;第4步兵师在“下一代指挥控制”(NGC2)的“常青藤刺”测试中亦取得类似成果。两项结果均证实技术可加速感知与射手提示;然而,在每次目标处置中,行动仍依人类流程的节奏推进。
2024年夏季在联合战备训练中心进行的旅级实地实验进一步佐证了此结论。第101空降师第2旅的作战试验表明,机器学习工具通过加速无人机全动态视频中的目标检测,显著提升了战术侦察效能。但这些系统被严格用作增强态势感知的收集工具,而非用于选择或打击目标。尽管该实验未涉及目标打击,但它反映了在其他领域观察到的相同结构性模式:AI加速感知与信息处理,而执行仍受人类节奏条令流程管控。
在此语境下,速度不仅是快慢的度量,更决定了人类判断何时能够行使。随着感知、目标识别与交战趋于同步,条令假定将在执行前夕进行的判断,必须提前实施。若非如此,人类决策将无法跟上自主性节奏。结果并非更快更好的判断,而是在审批滞后于事态发展导致的“作战瘫痪”,与指挥官在未充分掌握态势下授权行动导致的“过早风险接受”之间的被迫抉择。
这一动态解释了为何仅靠物资或编制调整无法弥合此差距。《陆军条令出版物1-01:条令入门》指出,若缺乏条令层面的显著变革,对条令、编制、训练、物资、领导与教育、人员及设施(DOTMLPF)的全面影响便无法实现。当条令落后时,物资与编制解决方案仅能缓解问题。因此,随着自主能力日趋成熟,陆军当前的目标打击方法所隐含的条令假设将产生日益严重的后果。下文将分析阻碍陆军整合LAWS的三大条令短板:节奏、执行权限及评估与控制。
条令短板:节奏、权限与控制
《陆军条令出版物3-13:信息》明确指出了节奏竞争,指出“预见更准、思维更清、决策行动更快、适应更迅之部队,最利于夺取并保持主动权”。然而,陆军条令并未将此认识转化为能以机器节奏运作的目标打击架构。阐述信息优势重要性的出版物(ADP 3-13)与规范陆军目标打击的出版物(《野战手册3-60:陆军目标打击》)之间存在脱节。自主性在理论上得到承认,但在实践中未被操作化。

(陆军参谋军士斯特森·曼努埃尔于2024年3月11日在加利福尼亚州欧文堡参加“融合项目顶点4”人机集成实验期间组装Ghost-X无人机系统。照片由斯塔福德·拉希克·帕特森中士拍摄)
节奏。 《野战手册3-0:作战》引入了陆军条令的首个摩擦点:节奏短板。其将作战流程(计划、准备、执行与评估)定义为陆军活动的引擎,但该流程是以人类节奏运行的。军事决策流程(MDMP)是审慎且顺序化的,目标打击贯穿其中。然而,现行条令未提供在整合流程中运用AI赋能决策支持工具、算法交战逻辑或自主性的程序框架。《野战手册3-60》与《野战手册5-0:计划与命令拟制》同样将目标打击与决策束缚于人类节奏周期。这造成了内在矛盾:《野战手册3-0》要求在多域行动中取得节奏优势,却仅规定了实现此目标的人类节奏流程。
“决定、探测、交付与评估”(D3A)针对的是传感器到射手行动顺序执行、且需持续人类输入的杀伤链而优化。尽管《野战手册3-60》描述D3A具有灵活性与迭代性,但其隐含假设是人类判断在整个四个阶段始终是节奏控制因素。D3A要求人类验证、授权交战并评估结果,而未提供将指挥官攻击指导表达为预先批准的LAWS交战逻辑框架。
此结构在机器节奏条件下失效。随着感知与打击融合为单一过程,D3A恰恰将人类判断集中在时间最稀缺的节点。结果不仅是执行变慢,更形成了一个阻碍自主系统按其设计节奏运行的条令瓶颈。D3A非但未能实现合法的“人在回路”自主性,反而为每个交战重新引入了“人在环内”延迟,重现了其本欲弥合的“速度差”。
执行权限。 陆军条令进一步假定指挥权限的行使贴近执行环节。计划条令通过授权下放强化了此假设,旨在当条件变化或无法联系指挥官时保留指挥权。《野战手册5-0》将执行权限视为指挥官意图的延伸,通过任务分析中建立的、并记录于决策支持与授权下放矩阵的授权决策来表达。这些工具定义了何人可在预期决策出现时于何种条件下行动,在执行期间保留了指挥权,但其前提是随着条件演变,持续的人类判断得以存续。
目标打击条令反映了相同逻辑。《野战手册3-60》通过预先批准的目标打击指导传递指挥官的判断。然而,此框架假定执行由在行动点行使判断的人类操作员完成,而非由一经授权便独立运行的自主系统完成。在机器节奏环境中,此假设不再成立。指挥权限必须以允许LAWS独立适用之形式贯穿执行全过程。《国防部指令3000.09》明确允许此种做法。
陆军条令未提供将此权限编码为可执行形式的机制。因此,自主性虽未被条令排除,但在执行期间处于条令无管束状态。此差距使指挥官面临难以维系的选择:要么通过扣留下放的执行权限来维持控制,以牺牲自主运用为代价保留人类决策所有权;要么接受缺乏表达权限条令机制的自主执行,从而削弱控制、问责与法律责任。
评估与控制。 第三个条令短板是评估与控制。现行条令模型假定授权致命武力执行期间的条件保持稳定。一旦执行下放至自主系统,此关系即告破裂。评估不能再仅聚焦于交战后的效果,控制亦不能再局限于执行时刻的人类指令。相反,二者必须确保随着信息、环境与系统性能的变化,交战逻辑持续反映合法的人类授权。
《国防部战争法手册》要求在计划与实施攻击时采取可行预防措施,以降低对受保护人员与物体的伤害风险,包括核实目标确属军事目标。这些义务预设了在武力运用时能够判定授权致命武力的条件是否依然有效。然而,陆军条令评估仍以效果为中心。《野战手册3-60》聚焦于战斗毁伤、功能毁伤与弹药效能。《野战手册5-0》的绩效与效能指标同样预设了人类导向的执行,并不适用于LAWS。
这些工具能描述击中了何物及产生了何种效果,但无法评估自主系统是否始终处于战争法边界内,目标识别置信度是否在全过程中保持有效,或系统性能退化是否致使先前授权失效。它们也未提供在条件变化时,支持持续“人在回路”监督以检测上述情况并在逾越法律阈值时中止执行的机制。其结果是,一个仅报告结果而无法验证在不断变化条件下自主致命武力是否仍受合法人类判断管控的框架。
《国防部指令3000.09》通过要求LAWS行为可预测、可靠,保留可追溯、可审计的决策逻辑,并具备必要时终止的能力,以应对此差距。该指令进一步要求操作人员通过人机界面保持对系统行为的有效洞察。这些要求预设了一种能够检测性能退化、无效假设及执行期间需干预条件的作战架构。
《野战手册3-84:作战法律支持》假定军法检察官在目标处置前向指挥官提供战争法合规性咨询,而指挥官对每个交战保留责任。在自主执行环境中,指挥官虽对结果保留法律责任,却缺乏在交战开始后影响决策的可行手段。
当前目标打击条令通过交战前后的阶段性重估履行此功能,但一旦致命行动开始,并未将重估权限延伸至自主执行环节。因此,指挥官必须在执行前将战争法与交战规则(ROE)约束编码进交战逻辑。战争法继续规制战场,但机器节奏的自主性要求法律合规性内嵌于规则与算法之中,而非通过人类触发的交战来强制执行。
核心问题因而并非自主系统能否预先审查或测试,而在于一旦部署于实战,能否维持合法控制。现有评估框架假定可通过部署前审查与交战后效果分析确保合法性。正如安妮玛丽·巴斯克斯在《军事法律评论》中所警示:“严格测试将排查出诸多问题,[但]它们不应成为应对武器系统自主性所带来的独特战争法问题的唯一保障。”自主执行引入了不确定性、性能退化与涌现行为,仅靠武器审查或基于效果的评估无法完全捕捉。若无条令机制在条件演变时监督自主行动,指挥官便需对缺乏管控手段的结果承担法律责任。
建议:将LAWS整合进目标打击体系
正如巴斯克斯所言,战争法审查流程“不适应自主武器独特性质”,因为法律上决定性的质询从扣动扳机时刻前移至设计时刻。弥合速度差不仅需要更快的传感器或改进的网络,更需要条令、编制与训练的革新,以使陆军能有效运用LAWS。以下建议直接对应本文指出的三大条令短板,为将“人在回路”LAWS整合进目标打击体系提供连贯路径。
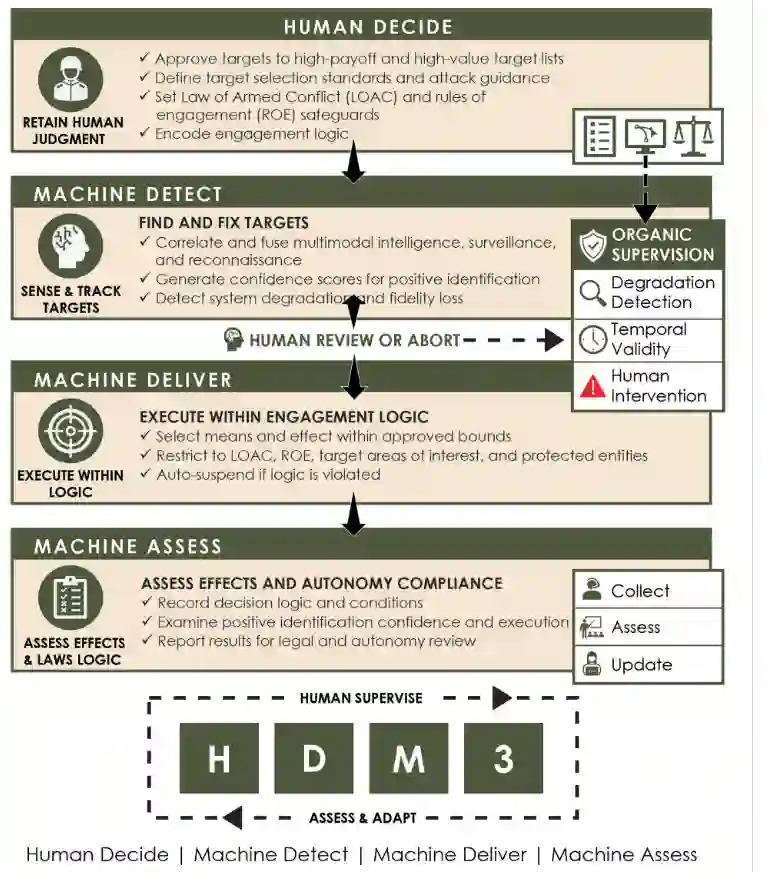
图1. HDM3目标打击方法论
条令改革:开发自主目标打击方法论。 本建议旨在建立整合LAWS的更新版条令目标打击方法论。后续建议将涉及使之可操作的评估、控制与法律审查机制。陆军应修订《野战手册3-60》,纳入专为自主性设计的改良版D3A目标打击方法论。此一新条令变体称为“人类决定-机器探测-机器交付-机器评估”(HDM3;见图1)。HDM3应调整目标打击方法论,在“决定”阶段保留人类判断,同时允许LAWS执行“探测”与“交付”功能,并生成初步评估数据。在此方法下,指挥官在目标协调委员会(TCB)期间对验证目标、批准目标选择标准与攻击指导矩阵保留专属责任。随后,该信息被编码为交战逻辑,在指挥官批准的约束下,针对高回报与高价值目标清单上的目标,向LAWS下放执行权限。
此方法催生了本文所称的“杀伤网”:一种非线性目标打击架构,其中分布式传感器与射手被动态链接,在指挥官批准的约束内执行交战,而非依赖固定的顺序化杀伤链。在杀伤网中,目标打击功能不受限于单一传感器-射手配对或线性流程;任何经授权的传感器均可依据指挥官批准的交战逻辑提示任何经授权的射手。此架构灵活性使目标打击能适应干扰、性能退化与战机出现。在线性杀伤链中,单一节点失效即终止交战;而在杀伤网中,节点失效将触发动态重构,剩余传感器与射手依据批准的交战逻辑重新分配以完成任务。
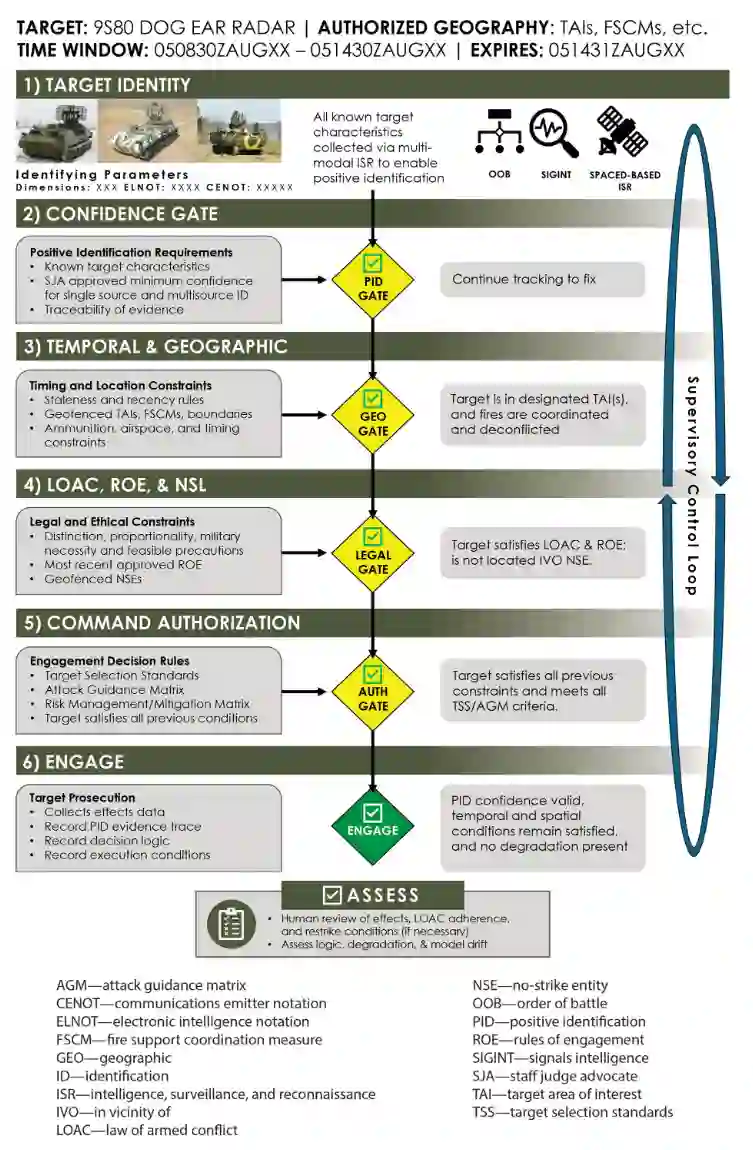
图2. 理论中的交战逻辑
交战逻辑通过管控自主行动的指挥官批准参数实施。这些参数明确了许可的目标类别、目标分类所需的置信度阈值、地理与时间边界、附带损伤限制(包括禁炸实体)及明确的终止准则(见图2)。它们共同定义了LAWS一经授权后得以行动的条件。从条令上讲,这些参数下放了执行权限,使指挥官意图与法律判断能贯穿自主执行全过程。
交战逻辑通过将权限、禁令与敌我识别要求转化为机器可执行约束,使ROE操作化。置信度阈值尤其充当了指挥官风险容忍度的明确表达,决定了动用致命武力前所需的确定性水平。由此,法律判断与指挥官意图并非仅在交战前夕行使,而是被刻意预先编码并延续至自主执行中。
虽然交战逻辑在TCB期间激活,但其大部分内容需在MDMP更早阶段构建。敌装备识别标准、禁炸实体、ROE约束及基线战争法参数应在任务分析阶段确立,并在行动方案制定期间细化,从而使TCB能聚焦于情境调整与授权,而非逻辑构建。
终止准则规定了自主执行必须暂停或中止的条件,如通信中断或置信度下降。模型漂移检测与性能监控使人类监督者能判断LAWS在不断变化的不确定条件下是否保持可靠。这些机制通过将判断嵌入受限自主行动的结构中,实现了“人在回路”控制。致命武力的运用因而严格限定于经问责制人类指挥官预先明确批准的参数范围内。
通过实施HDM3方法论,陆军可利用LAWS作为传感器、射手与初步评估者,加速其杀伤网运作。HDM3能在杀伤网内实现效果的快速聚合,并自主将资产重新分配至下一优先目标。交战逻辑内置冗余,在降低监督负担的同时不削弱监督。仍需持续人类输入的阶段是评估。尽管LAWS能生成初步评估数据,但解读效果与评估自主行为仍需有意义的判断。LAWS提供数据,人类则利用来自其他收集平台的输入进行解读。
HDM3通过将判断前移至源自TCB决策的交战逻辑审慎设计中,为机器节奏定义的战场重构了人类控制,且未改变指挥权限。此方法承认未来战争将超越持续人类输入的节奏,但并未否定法律与伦理判断的必要性。通过适配HDM3,《野战手册3-60》能为指挥官提供在“现代战争速度将很快超越人类定向、理解与行动能力”的环境中整合LAWS至目标打击的工具。
条令改革:评估与监督自主系统。 《野战手册3-60》的评估框架仍围绕战斗毁伤评估与基于效果的度量指标,预设了以人类为中心的作战。LAWS要求条令机制不仅能评估效果,还需评估自主系统所执行决策过程的可靠性、置信度与行为表现。《野战手册3-60》应更新,以承认机器实施的初步评估数据为一项条令功能,并由人类负责验证、异常检测与交战逻辑调整。
在此框架下,监督通过对自主系统行为与性能的持续人类评估来行使,当评估显示可靠性下降或条件改变时,指挥官与参谋有权修改或中止交战逻辑。此监督功能确保下放的执行权限在整个执行过程中持续有效,并在授权条件不再成立时予以收回。通过将评估从仅关注效果扩展至包含算法性能,条令在支持LAWS合法“人在回路”运用的同时,保留了有意义的人类判断。
条令改革:针对交战逻辑设计的战争法审查。 《野战手册3-84》将军法检察官嵌入目标打击流程,在交战执行前审查并就致命决策提供咨询,这预设了一种人类节奏模型,即法律审查在交战授权时刻附近进行。当指挥官有充足时间评估目标并在武力运用前干预时,此假设成立。然而,LAWS压缩了此决策空间。为在此条件下保留合法人类判断,战争法合规性主要通过交战逻辑设计而非邻近交战时刻的审查来行使。
《野战手册3-84》应更新,要求军法检察官在TCB期间就目标类别、置信度阈值、地理限制、附带损伤约束及终止准则的审查向指挥官提供咨询。指挥官通过批准的交战逻辑下放执行权限,对武力使用保留法律责任,而LAWS仅在那些参数范围内执行交战。此转变使得在保持适当人类判断与清晰致命决策问责的同时,实现了LAWS的运用。
编制改革:建立自主目标打击单元。 为在战术层级监督HDM3,陆军应在现有师与军目标打击单元内建立自主目标打击单元(ATC)。ATC将重组当前目标打击功能,扩展其对自主交战逻辑的监督控制、评估与调整职责。ATC将:
- 监督自主系统的控制;
- 监控置信度评分、模型漂移与电磁战(EW)性能退化;
- 调整或撤销下放的执行权限;
- 生成算法评估报告。
ATC是条令改革的编制对应物,为指挥官提供专司“人在回路”监督的节点,使LAWS整合进目标打击成为可能,且不牺牲控制或问责。ATC应由来自现有陆军专业的跨职能团队组成,包括运筹学与系统分析、野战炮兵、军事情报、网络与电磁战以及军法检察官。
运筹学与系统分析提供解读算法性能、置信度指标与退化迹象所需的分析专长,将LAWS输出转化为指挥官可据此行动的判断。野战炮兵与情报人员确保与目标打击优先级及威胁评估保持一致。网络与EW人员评估电磁干扰、欺骗与数据损毁对自主性能的影响。军法检察官支持审查与修改交战逻辑,以确保持续遵守战争法与ROE。
训练改革:制度化自主素养。 LAWS目标打击中的人类判断必须制度化,而非即兴发挥。将HDM3整合进目标打击体系对士兵与领导者提出了新的认知、技术与法律要求。监督LAWS不仅需要熟悉平台,更需具备设计交战逻辑、解读算法性能、检测性能退化以及在自主行为逼近法律或作战极限时进行干预的能力。这些流程应通过初级入伍训练(IET)、职业军事教育(PME)、专业训练与集体训练的有意结合来实现制度化。
从IET到PME的递进教育。 自主素养必须嵌入陆军IET与PME体系,确保指挥官、参谋与士兵理解如何运用与监督LAWS。此教育应随军衔与职责提升而递进,从概念性认知审慎过渡到条令应用与作战设计。 在入门层级,训练应介绍AI基础与基本自主性概念,建立关于自主系统如何感知、分类与行动的共同词汇与理解。随着军官与士官晋升,PME应日益强调自主性在目标打击体系中的应用,包括自主传感器、特征管理、置信度阈值与基于风险的运用决策。在中高级层级,教育应聚焦于师军级参谋的LAWS计划与监督,涵盖HDM3整合、交战逻辑设计、将LAWS纳入战斗节奏事件(如收集管理与目标工作组)以及法律与伦理监督。
自主侦察与打击课程。 陆军应设立“自主侦察与打击”(ARAS)课程,以制度化目标打击体系中对LAWS的监督。ARAS应作为ATC人员的核心资格课程。该课程应提供针对火力与情报人员的、实用的跨学科课程,聚焦于自主系统的实践性监督。ARAS应培训军官、准尉与士官,并授予附加技能标识。毕业生将有资格在MDMP中整合自主性,在HDM3下设计并监督下放的执行权限,以及实施交战逻辑设计与算法评估。
LAWS运用集体训练。 符合《野战手册7-0:训练》关于逼真、对抗性训练环境的要求,个体训练必须辅以集体训练,以使部队做好运用LAWS的准备。驻地与陆军作战训练中心的集体训练环境应至少纳入:
- 具有逼真探测、误分类与延迟特征的模拟自主传感器;
- 影响LAWS置信度评分的对抗性EW与欺骗;
- 在HDM3方法论与杀伤网内执行的机器节奏打击序列;
- 指挥所演习期间的ATC整合;
- 交战逻辑失效与中止条件模拟。
这些强化措施使部队能在逼真条件下练习监督控制、法律监督与交战参数的快速调整,弥合概念理解与作战运用间的差距。此类环境不仅对战术熟练度至关重要,对保留人类判断亦不可或缺——指挥官与参谋在此过程中学会识别自主行为在实战中何时逼近法律、伦理或可靠性极限。
结论
陆军正处于一个拐点。战争本质恒久,但其形态正加速迈向人类认知独力难及的节奏。对手并未等待美国调和LAWS整合问题;他们正构建旨在比美军感知更快完成感知、决策与打击的架构。
本文阐明,解决方案不仅在于物资,更在于目标打击的智力架构及其所依存的条令体系。通过将人类判断集中于“决定”阶段,并将机器速度功能下放至受限自主行动,陆军可在遵守战争法的前提下运用LAWS。HDM3等条令改革、将自主性整合进《野战手册3-60》与《野战手册3-84》、以及承认自主系统为条令手段,为此转型提供了概念框架。ATC等编制创新及包含ARAS课程的训练管道,确保了自主监督既能制度化又可扩展。
陆军的优势将不系于更快的机器,而在于其条令能否在人类速度被机器节奏消解前,使人类判断得以有效行使。通过即刻推进条令、编制与训练的现代化,陆军方能确保主动权始终由人类命令行事,而非落入对手算法之手。
数年前,美国陆军第18空降军展示了“Maven智能系统”(MSS)加速目标定位流程的强大效能——仅以20人的团队便完成了2003年时需要2000人才能完成的工作量。此后,美军在全球各作战司令部总部广泛列装了诸如MSS之类的人工智能决策支持系统(AI-DSS)。媒体报道指出,MSS是支撑“史诗怒火”行动中持续高节奏目标定位流程的关键赋能器。
人工智能决策支持系统——即利用各类AI工具摄取、生成、共享及基于信息采取行动的软件系统——的军事应用远不止于目标定位流程。凡是涉及海量异构数据、需经数据解读、态势研判、决策制定与执行(且常需周期性迭代)的决策流程,均可受益于AI-DSS工具。
当前关于AI-DSS的公开讨论,多停留于对其军事应用可能性的模糊描述。本文通过两项战役层级军事流程的案例研究,填补这一认知空白:在这两类场景中,部署适宜的AI-DSS工具可带来与第18空降军优化火力流程相媲美的提升。一项案例研究探讨将AI-DSS应用于陆军火力单位的弹药补给流程;另一项则聚焦于将AI-DSS应用于驱动“联合空中任务周期”(JATC)的流程。在两种场景下,AI-DSS均能在保持决策质量与人类判断的前提下,实现流程提速、增强灵活性并减少人力投入。就JATC而言,AI-DSS更提供了重新审视沿用数十年之久的“72小时日常空中突击周密规划周期”的契机。这两项潜在应用虽能消解旧有风险,但也伴随着必须应对的新型风险。
案例研究表明,在上述领域部署适宜AI-DSS能力的主要障碍并非软件开发,而是此类工具所需数据的获取。大量必需数据仅散存于各基层单位,且常以非结构化格式(如PowerPoint幻灯片或单位独有的电子表格)保存。破除官僚壁垒以使这些数据能被AI-DSS数字化调用,应成为任何规模化推广计划的首要任务。
基于案例研究,提出以下建议:
- 确保AI-DSS可获取所需的数字化数据。 高层部门对破除官僚或文化壁垒的支持力度前所未有——此刻正是行动之时。根据赫格塞思部长2026年1月9日签署的AI备忘录,首席数字与人工智能办公室(CDAO)已获授权并受领相关任务。
- 借鉴第18空降军等单位的最佳实践——包括其融合操作人员与软件工程师的DevSecOps式开发模式——并予以采纳或适配。 无需重复造轮子。CDAO应系统梳理并推广这些经验。CDAO还应为各作战司令部配属数据与评估支援团队,以强化前沿AI-DSS的研发与部署效能。这些团队应由具备跨行业、学术界及联合部队经验的专业人员组成,以充分转化并应用已验证的教训与最佳实践。
- 在实战行动中向指挥中心部署此类能力,以发展作战最佳实践、加速培养经验丰富的用户群体,并为软件工程师提供实战反馈。
正如本文案例研究所揭示的,上述步骤将优化美军若干最重要的陆军及联合火力相关流程,并有助负责任地加速人工智能赋能能力在全军的研发与列装进程。
目录
执行摘要
概述与引言
对军事人工智能决策支持系统(AI-DSS)的推动
- 军事需求
- AI-DSS 采用的证据
- 扩展 AI-DSS
理解 AI-DSS
适用于 AI-DSS 的战役级任务
- 用于陆军火力单位弹药补给的 AI-DSS
- 将 AI-DSS 应用于联合空中任务周期(JATC)
- 阶段2:目标开发与提名
- 阶段3:武器配置与分配
- 子阶段3A:武器配置
- 子阶段3B:分配
- 阶段4:空战任务指令(ATO)生成与分发
- AI-DSS 的预期作战效益
- AI-DSS 对陆军火力再补给的支持效益
- AI-DSS 对联合空中任务周期(JATC)的支持效益
- 人力效率
- 流程加速
- 改进流程灵活性
预期的作战风险
实施挑战
- 软件开发
- 数据获取
- 整合
潜在的后续步骤
结论
附录 A:空军对空中任务周期的描绘
附录 B:支持空中任务周期的空军数字工具
附录 C:民用部门交付调度
附录 D:缩略语









